Vektoren werden auf dieser Seite mit fetten Buchstaben in der Frakturschrift bezeichnet. Die Kodierung erfolgt mit Unicode-Glyphen 1D565 bis 1D59F. Diese werden mit aktuellen Versionen vieler Browser dargestellt. Nicht dargestellt werden sie mit Windows® und iOS® Versionen von Safari®.
Vektoren
Zur mathematischen Formulierung und Lösung physikalischer Probleme wurden gerichtete Größen entwickelt. Die "Vektor Analysis" wurde axiomatisch von Josuah Willard Gibbs im dreidimensionalen Raum formuliert. In der Analytischen Geometrie werden Vektoren in einem karthesischen Koordinatensystem als Pfeile repräsentiert. Der Betrag a eines Vektors 𝖆 ist die Läge des Pfeils a = |𝖆|, also eine Strecke.
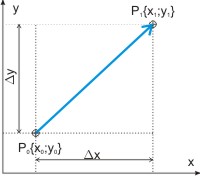 Geht man in einem karthesischen Koordinatensystem von einm Punkt P0 mit den Koordinaten x0 und y0 aus und verschiebt ihn um Δx und Δy zu einem Punkt P1 mit den Koordinaten x1 = x0 + Δx und y1 = y0 + Δy so ist diese Verschiebung ein Vektor. P0P1 = 𝖆 = {x0 + Δx; y0 + Δy} ist also auch eine Repräsentation des Vektors im kathesischen Koordinatensystem.
Geht man in einem karthesischen Koordinatensystem von einm Punkt P0 mit den Koordinaten x0 und y0 aus und verschiebt ihn um Δx und Δy zu einem Punkt P1 mit den Koordinaten x1 = x0 + Δx und y1 = y0 + Δy so ist diese Verschiebung ein Vektor. P0P1 = 𝖆 = {x0 + Δx; y0 + Δy} ist also auch eine Repräsentation des Vektors im kathesischen Koordinatensystem.
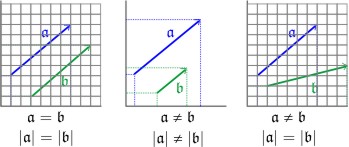
Zwei Vektoren 𝖆 und 𝖇 sind genau dann gleich, wenn ihre Repräsentanten (Pfeile) in Betrag und Richtung übereinstimmen. Eine zu den Achsen parallele Verschiebung im Koordinatensystem, also die Änderung der Koordinaten x0 und y0 von P0, verändert die Vektoren nicht. Der Vektor 𝖆 ist also unabhägig von seiner Lage im Koordinatensystem, und er ist nur mit Δx und Δy eindeutig beschrieben. Zieht man immer die Koordinate des Anfangs von der der Spitze ab, ist auch die Richtung des Vektors in der Angabe enthalten. Den Winkel α, den der Vektor mit der positiven x-Achse einschließt erhält man dann mit:
- tan α = Δy ⁄ Δx (Definition der Winkelfunktion)
- (|𝖆|)2 = (Δx)2 + (Δy)2 (Satz des Pythagoras)
Vektoraddition
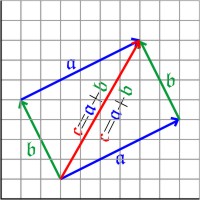
Man kann Vektoren addieren, in dem man die sie so anordnet, dass das stumpfe Ende des einen an der Spitze des anderen hängt. Das Additionsergebnis ist der Vektor, der vom stumpfen Ende des ersten zum Spitze des zweiten reicht. Dabei ist das Ergebnis unabhängig von der Reihenfolge: 𝖈 = 𝖆 + 𝖇 = 𝖇 + 𝖆. In Matrixschreibweise:
 In der rechten Abbildung ist:
In der rechten Abbildung ist:
- Δx𝖆 = 6,
- Δy𝖆 = 3,
- Δx𝖇 = -2,
- Δy𝖇 = 4,
- Δx𝖈 = 4,
- Δy𝖈 = 7,
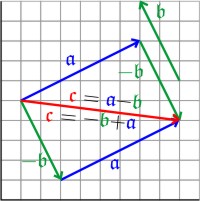 Zur Subtraktion addiert man einfach den Vektor, der die umgekehrte Richtung hat, also -𝖇 = {2; -4}:
Zur Subtraktion addiert man einfach den Vektor, der die umgekehrte Richtung hat, also -𝖇 = {2; -4}:
𝖈 = {6; 3} + {2; -4} = {6 + 2; 3 - 4} = {8; -1}.
 Aus der Umkehrung der Vektoraddition leitet man die Vektorzerlegung ab. Man kann jeden Vektor in zwei vektorielle Komponenten zerlegen, die parallel zu jeweils einer der Koordinatensystemachsen liegen. Das kann zu übersichtlicheren Berechnungen führen, wie z. B. beim Drehimpuls oder bei der Zusammensetzung des Windes beim Segeln aus den zwei Komponenten Fahrtwind und wahrer Wind.
Aus der Umkehrung der Vektoraddition leitet man die Vektorzerlegung ab. Man kann jeden Vektor in zwei vektorielle Komponenten zerlegen, die parallel zu jeweils einer der Koordinatensystemachsen liegen. Das kann zu übersichtlicheren Berechnungen führen, wie z. B. beim Drehimpuls oder bei der Zusammensetzung des Windes beim Segeln aus den zwei Komponenten Fahrtwind und wahrer Wind.
Multiplikationen von Vektoren
Multiplikation mit einer Zahl
Multipliziert man einen Vektor 𝖆 mit einer Zahl n, so entspricht das Ergebnis der n-fachen Addition des Vektors: 𝖈 = 𝖆 + 𝖆 + 𝖆 + 𝖆 + … = n · 𝖆. Das Ergebnis ist wieder ein Vektor.
Skalarprodukt von Vektoren
Die Multiplikation zweier Vektoren zu einem Skalar wird häufig in der Physik benötigt. Die ungerichtete Größe (Skalar) "Arbeit A" ist Produkt der Vektoren Kraft 𝕶 und Weg 𝖘: A = 𝕶 · 𝖘.
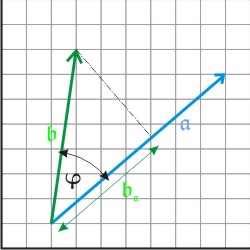 Geometrisch ist das Skalarprodukt die Fläche des Rechtecks, aus einem Vektor und der Projektion des zweiten Vektors auf den ersten. Diese Fläche errechnet sich aus dem Betrag des Vektors 𝖆 und dem Betrag der Projektion 𝖇𝖆 des Vektors 𝖇 auf 𝖆.
Geometrisch ist das Skalarprodukt die Fläche des Rechtecks, aus einem Vektor und der Projektion des zweiten Vektors auf den ersten. Diese Fläche errechnet sich aus dem Betrag des Vektors 𝖆 und dem Betrag der Projektion 𝖇𝖆 des Vektors 𝖇 auf 𝖆.
Die Projektion 𝖇𝖆 ist nach der Definition der Winkelfunktionen:
- 𝖇𝖆 = 𝖇 · cos φ
Gibbs definiert das Skalarprodukt als:
- 13. Def. — The direct product of α and β (written α · β ) is the scalar quantity obtained by multiplying the product of their magnitudes by the cosine of the angle made by their directions. [1]
- 𝖆 · 𝖇 = |𝖆| · |𝖇| · cos φ.
Die Formel des Skalarprodukts in Matrixschreibweise lautet:

Hier führen wir den Einheitsvektor 𝖆0 ein: 𝖆0 = 𝖆 ⁄ |𝖆|. Seine Länge wird geschickterweise den Einheiten auf den Koordinatenachsen gleichgesetzt, also 𝖆0∥ der Einheit auf der x-Achse und 𝖆0⊥ der auf der y-Achse.
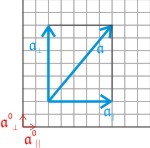 Da man jeden Vektor in zwei Komponenten zerlegen kann, die jeweils parallel zu den Achsen des Koordinatensytems sind, kann man jede der Komponeten als Skalarprodukt aus einer (reelen) Zahl i, j und dem Einheitsvektor darstellen.
Da man jeden Vektor in zwei Komponenten zerlegen kann, die jeweils parallel zu den Achsen des Koordinatensytems sind, kann man jede der Komponeten als Skalarprodukt aus einer (reelen) Zahl i, j und dem Einheitsvektor darstellen.
- 𝖆 = 𝖆∥ + 𝖆⊥
- 𝖆∥ = i · 𝖆0∥
- 𝖆⊥ = j · 𝖆0⊥
Vektormultiplikation
Gibbs definiert das Vektorprodukt als:
-
14. Def. —The skew product of α and β (written α × β) is a vector function of α and β. Its magnitude is obtained by multiplying the product of the magnitudes of α and β by the sine of the angle made by their directions. Its direction is at right angles to α and β, and on that side of the plane containing α and β (supposed drawn from a common origin) on which a rotation from α to β through an arc of less than 180° appears counter-clockwise.
The direction of α × β may also be defined as that in which an ordinary screw advances as it turns so as to carry α toward β.
Again, if α be directed toward the east, and β lie in the same horizontal plane and on the north side of α, α × β will be directed upward. [1]
 Das Produkt zweier Vektoren 𝖆 × 𝖇 ist ein Vektor 𝖈, der senkrecht steht auf der von den beiden Multiplikanten aufgespannten Ebene. Seine Länge entspricht zahlenmäßig der Fläche des Parallelogramms zwischen den Multiplikanten (|𝖆| · |𝖇| · sin φ)
Das Produkt zweier Vektoren 𝖆 × 𝖇 ist ein Vektor 𝖈, der senkrecht steht auf der von den beiden Multiplikanten aufgespannten Ebene. Seine Länge entspricht zahlenmäßig der Fläche des Parallelogramms zwischen den Multiplikanten (|𝖆| · |𝖇| · sin φ)
Die Richtung des Produktvektors 𝖈 ist durch ein orientiertes Rechtssystem gegeben. Anschaulich macht man es sich mit den Fingern der rechten Hand. Hinweis: Der Daumen deutet in die Richtung des ersten Gliedes des Vektorproduktes, der Zeigefinger in Richtung des zweiten; dann zeigt der Mittelfinger die Richtung des Vektorproduktes an.

Interessanterweise hängt die Richtung des Vektorprodukts von der Reihenfolge der Multiplikanten ab!
- 𝖈 = 𝖆 × 𝖇
- − 𝖈 = 𝖇 × 𝖆
Das Vektorprodukt von parallelen (oder antiparallelen) Vektoren ist Null, denn es wird keine Fläche zwischen ihnen aufgespannt:
- 𝖆 × 𝖆 = 𝖆 × (− 𝖆) = 0.
Mit 𝖆 {6;0;0} und 𝖇 {5;7;0} ergibt sich für 𝖈:
Vektoren im Kugelkoordinatensystem
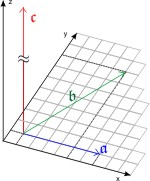
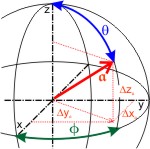 Für die Betrachtung von Drehbewegungen ist es vorteilshaft, die Vektoren in räumlichen Polarkoordinaten darzustellen. Um einen Punkt auf der Kugeloberfläche eindeutig zu beschreiben, braucht man neben dem Kugelradius r zwei Winkel Φ und θ, die am Mittelpunkt der Kugel aus gemessen werden. (Der Segler kennt das von den Ortskoordinaten!) Der Ortsvektor 𝖆 {Δx;Δy;Δz} muss also mit seiner Länge r = |𝖆| und zwei Winkeln angegeben werden. Es bieten sich die Winkelfunktionen an:
Für die Betrachtung von Drehbewegungen ist es vorteilshaft, die Vektoren in räumlichen Polarkoordinaten darzustellen. Um einen Punkt auf der Kugeloberfläche eindeutig zu beschreiben, braucht man neben dem Kugelradius r zwei Winkel Φ und θ, die am Mittelpunkt der Kugel aus gemessen werden. (Der Segler kennt das von den Ortskoordinaten!) Der Ortsvektor 𝖆 {Δx;Δy;Δz} muss also mit seiner Länge r = |𝖆| und zwei Winkeln angegeben werden. Es bieten sich die Winkelfunktionen an:
- Δx ⁄ r = cos Φ · sin θ ⇒ Δx = r · cos Φ · sin θ
- Δy ⁄ r = sin Φ · sin θ ⇒ Δy = r · sin Φ · sin θ
- Δz ⁄ r = cos θ ⇒ Δz = r · cos θ
- sin (90° - θ) ⁄ r = Δz ⁄ r = cos θ ⇒ Δz = r · cos θ
- cos (90° - θ) ⁄ r = a′ ⁄ r = sin θ ⇒ a′ = r · sin θ
- cos Φ = Δx ⁄ a′ = Δx ⁄ (r · sin θ) ⇒ Δx = r · cos Φ · sin θ
- sin Φ = Δy ⁄ a′ = Δy ⁄ (r · sin θ) ⇒ Δy = r ·sin Φ · sin θ
Differenzieren von Vektoren
Das Differenzieren von Vektoren beruht im Grunde auf der Zerlegung eines Vektors in seine drei karthesischen Komponenten und dem Differenzieren der Komponenten, die man dann durch Vektoraddition wieder zum Ergebnisvektor zusammensetzt.
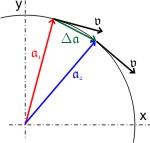 Ein Punkt bewege sich mit konstanter Geschwindigkeit 𝖛 auf einem Kreis um den Ursprung eines karthesischen Koordinatensystems. Sein Ort wird durch Vektor 𝖆 im Ursprung beschrieben. Zum Zeitpunkt t1 sei sein Ort die Spitze des Vektors 𝖆1 (rot) und zum Zeitpunkt t2 stehe er bei 𝖆2 (blau). Er hat sich also in der Zeit Δt = t2 - t1 um den Kreisbogen über der Kreissehne, die die Spitzen von 𝖆1 und 𝖆2 verbindet, bewegt. Für kleine Winkeländerungen kann man den Unterschied der Längen der Sehne und des Kreisbogens vernachlässigen: Δ𝖆 = 𝖆2 - 𝖆1. Die Geschwindigkeit des Punktes ist definiert als 𝖛 = Δ𝖆 ⁄ Δt. Läßt man den Weg nahe Null zu, schreibt man das Differenzial 𝖛 = d𝖆 ⁄ dt: der Geschwindigkeitsvektor ist die zeitliche Ableitung des Ortsvektors 𝖆 eines Punktes auf der Kreisbahn. Der Geschwindigkeitsvektor steht senkrecht auf dem Ortsvektor, da er tangential zur Kreisbahn liegt.
Ein Punkt bewege sich mit konstanter Geschwindigkeit 𝖛 auf einem Kreis um den Ursprung eines karthesischen Koordinatensystems. Sein Ort wird durch Vektor 𝖆 im Ursprung beschrieben. Zum Zeitpunkt t1 sei sein Ort die Spitze des Vektors 𝖆1 (rot) und zum Zeitpunkt t2 stehe er bei 𝖆2 (blau). Er hat sich also in der Zeit Δt = t2 - t1 um den Kreisbogen über der Kreissehne, die die Spitzen von 𝖆1 und 𝖆2 verbindet, bewegt. Für kleine Winkeländerungen kann man den Unterschied der Längen der Sehne und des Kreisbogens vernachlässigen: Δ𝖆 = 𝖆2 - 𝖆1. Die Geschwindigkeit des Punktes ist definiert als 𝖛 = Δ𝖆 ⁄ Δt. Läßt man den Weg nahe Null zu, schreibt man das Differenzial 𝖛 = d𝖆 ⁄ dt: der Geschwindigkeitsvektor ist die zeitliche Ableitung des Ortsvektors 𝖆 eines Punktes auf der Kreisbahn. Der Geschwindigkeitsvektor steht senkrecht auf dem Ortsvektor, da er tangential zur Kreisbahn liegt.
Die polaren Koordinaten des Vektors 𝖆1 sind Δx = |𝖆1| · cos Φ und Δy = |𝖆1| · sin Φ.
Quellen
- Josiah Willard Gibbs: Elements of Vector Analysis, (Eigenverlag) New Haven 1881-1884.
- Edwin Bidwell Wilson: Vector Analysis, Founded upon the Lectures of J. Willard Gibbs, New York, London, 1902.
- A. Föppl: Rechnen mit Vectorgrössen in der Physik; in: Einführung in die Maxwell′sche Theorie der Elektricität, Leipzig 1894.
|
|
© Rainer Stumpe URL: http://www.rainerstumpe.de |