Vektoren werden auf dieser Seite mit fetten Buchstaben in der Frakturschrift bezeichnet. Die Kodierung erfolgt mit Unicode-Glyphen 1D565 bis 1D59F. Diese werden mit aktuellen Versionen vieler Browser dargestellt. Nicht dargestellt werden sie mit Windows® und iOS® Versionen von Safari®.
Drehbewegungen
Ein wichtiges Konzept, das Segler kennen sollten, ist die Physik der Drehbewegung. Sie ist die Grundlage zum Verstehen z.B. des Schraubeneffekts und der der Entstehung von Zyklonen (Tiefdruckgebiete). Die physikalischen Größen sind der Bahndrehimpuls und das Drehmoment.
Definition der Drehbewegung
Der Hebel
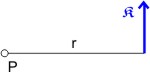 Der Hebel ist ein Körper, der im Punkt P unterstützt wird. Im Abstand r vom Unterstützungspunkt wirkt eine Kraft 𝕶, was zur Folge hat, dass sich der Hebel in Richtung 𝕶 um P dreht. Jeder kennt das vom Schraubenschlüssel. Je größer die Kraft 𝕶 oder je länger der Hebel (Abstand r) ist, desto leichter löst sich die Schraube.
Der Hebel ist ein Körper, der im Punkt P unterstützt wird. Im Abstand r vom Unterstützungspunkt wirkt eine Kraft 𝕶, was zur Folge hat, dass sich der Hebel in Richtung 𝕶 um P dreht. Jeder kennt das vom Schraubenschlüssel. Je größer die Kraft 𝕶 oder je länger der Hebel (Abstand r) ist, desto leichter löst sich die Schraube.
 Dieser Zusammenhang wird quantitativ dargestellt in der Formel
Dieser Zusammenhang wird quantitativ dargestellt in der Formel
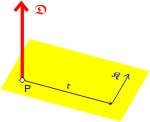
- 𝕯 = 𝖗 × 𝕶
Mit den Regeln für das Vektorprodukt kann man das Senkrechtstehen des Drehmoments auf der Hebelebene zeigen. Dazu werden die Vektoren in räumlichen Polarkoordinaten dargestellt.

- |𝕯| = r · k.
Das Kräftepaar
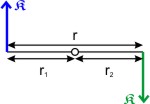 Greifen an einem Körper zwei parallele aber entgegengesetzt wirkende gleich große Kräfte 𝕶 im Abstand r an, so wirken auf den Körper zwei Drehmonente 𝕯1 = 𝖗1 × 𝕶 und 𝕯2 = 𝖗2 × 𝕶. Da sich die beiden Kräfte 𝕶 nicht zu einer resultierenden Kraft zusammensetzen und wegen r1 + r2 = r, ergibt sich nur ein Drehmonent 𝕯 = 𝖗 × 𝕶, das von der Lage der Achse unabhängig ist.
Greifen an einem Körper zwei parallele aber entgegengesetzt wirkende gleich große Kräfte 𝕶 im Abstand r an, so wirken auf den Körper zwei Drehmonente 𝕯1 = 𝖗1 × 𝕶 und 𝕯2 = 𝖗2 × 𝕶. Da sich die beiden Kräfte 𝕶 nicht zu einer resultierenden Kraft zusammensetzen und wegen r1 + r2 = r, ergibt sich nur ein Drehmonent 𝕯 = 𝖗 × 𝕶, das von der Lage der Achse unabhängig ist.
Der Drehimpuls
 Analog zum Impuls 𝖕 = m · 𝖛 eines gleichmäßig linear bewegten Körpers mit der Masse m kann man einen Drehimpuls eines mit gleichmäßiger Geschwindigkeit rotierenden Körpers definieren.
Analog zum Impuls 𝖕 = m · 𝖛 eines gleichmäßig linear bewegten Körpers mit der Masse m kann man einen Drehimpuls eines mit gleichmäßiger Geschwindigkeit rotierenden Körpers definieren.
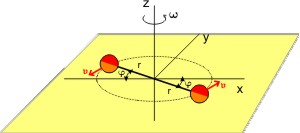
Eine starre Hantel rotiere in der x,y-Ebene um die z-Achse, sodaß der Schwerpunkt der Hantel im Ursprung des Koordinatensystems liege. Der Geschindigkeitsvektor 𝖛 der Körper liegt dann auch in der x,y-Ebene und er ist abhängig vom Abstand r von der Drehachse und von der Änderung des Winkels φ
- 𝖛 = Δx ⁄ Δt
- Δx ist der Bruchteil des Kreisbahnumfangs, der dem der Winkeländerung am Vollumfang entspricht:
- 𝖛 = (r ·Δφ) ⁄ Δt.
- mit der Winkelgeschwindigkeit ω = Δφ ⁄ Δt
- 𝖛 = r · ω
|
|
© Rainer Stumpe URL: http://www.rainerstumpe.de |