Vektoren werden auf dieser Seite mit fetten Buchstaben in der Frakturschrift bezeichnet. Die Kodierung erfolgt mit Unicode-Glyphen 1D565 bis 1D59F. Diese werden mit aktuellen Versionen vieler Browser dargestellt. Nicht dargestellt werden sie mit Windows® und iOS® Versionen von Safari®.
Drehbewegungen
Das Drehmoment kennt man aus den Leistungsangaben von Automotoren: je größer es ist, desto besser ist der Durchzug. Es spielt auch eine Rolle beim Hebel (z.B. beim Schraubenschlüssel).
Das Drehmoment
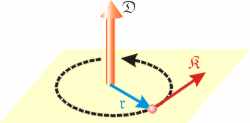 Das Drehmoment 𝕯 ist das Vektorprodukt aus der Kraft 𝕶
und dem Ortsvektor 𝖗 (Hebelarm).
Das Drehmoment 𝕯 ist das Vektorprodukt aus der Kraft 𝕶
und dem Ortsvektor 𝖗 (Hebelarm).
Berechnet wird die Größe der Drehmoments 𝕯 = |𝖗| · |𝕶| · sin α (Benennung N·m, α Winkel zwischen 𝖗 und 𝕶), seine Richtung wird mit der rechten Hand bestimmt:

Interessanterweise wird ein Drehmoment nicht nur erzeugt, wenn eine Kraft auf einen Hebel wirkt. Es entsteht auch ein Drehmoment, wenn sich der Drehimpuls ändert. Das läßt sich mathematisch zeigen und experimentell beobachten. Beginnen wir mit der Ableitung. Die (zeitliche) Änderung des Drehimpulses schreibt man differentiell d𝕴 ⁄ dt. Nun ist 𝕴 = 𝖗 x 𝖕, und wir können für den Drehimpuls schreiben:
![]()
Nach den Regeln der Differenzierung von Summen erhält man den Ausdruck:
![]()
Nun ist d𝖗 ⁄ dt = m · 𝖛 (Geschwindigkeitsvektor) = 𝖕. Und das Vektorprodukt paralleler Vektoren ist Null ( 𝖕 x 𝖕 = 0). Wir erhalten also:
![]()
Die Änderung des Impulses d𝖕 ⁄ dt ist eine Kraft (nach Newtons Gesetzen ändert sich der Impuls nur unter dem Einfluß einer Kraft). Damit nimmt die zeitliche Änderung des Drehimpulses die Form an:
![]()
Anders herum formuliert: Die zeitliche Änderung des Drehimpulses entspricht dem wirkenden Drehmoment.
Um die Eigenschaften des Drehimpulses abzuschätzen, untersuchen wir ein reales Beispiel: den Kreisel ehe wir und dem Radeffekt der Schiffsschraube zuwenden.
|
|
© Rainer Stumpe URL: http://www.rainerstumpe.de |