Vektoren werden auf dieser Seite mit fetten Buchstaben in der Frakturschrift bezeichnet. Die Kodierung erfolgt mit Unicode-Glyphen 1D565 bis 1D59F. Diese werden mit aktuellen Versionen vieler Browser dargestellt. Nicht dargestellt werden sie mit Windows® und iOS® Versionen von Safari®.
Der Kreisel
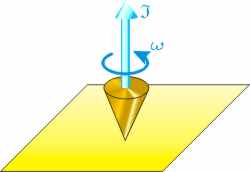 Der Kreisel ist ein Kinderspielzeug mit auffälligem Verhalten. Typisch ist er ein Kegel, der, solange er schnell genug rotiert, stabil auf der Spitze steht. Verlangsamt sich seine Rotation, so beginnt er zu taumeln und fällt schließlich um (womit er seine stabile Gleichgewichtslage einnimmt). Was ihn aufrecht hält ist sein Drehimpuls. Denn der bleibt konstant, solange keine äußere Kraft wirkt
(1. Newtonsches Axiom), behält also Richtung und Betrag bei. Er beginnt zu taumeln, wenn der Drehimpulsvektor nicht mehr in seiner Symmetrieachse liegt (bzw. sein Schwerpunkt über dem Auflagepunkt). Ursache sind typisch Ungleichmäßigkeiten seiner Gewichtsverteilung und / oder Unebenheiten des Untergrundes.
Der Kreisel ist ein Kinderspielzeug mit auffälligem Verhalten. Typisch ist er ein Kegel, der, solange er schnell genug rotiert, stabil auf der Spitze steht. Verlangsamt sich seine Rotation, so beginnt er zu taumeln und fällt schließlich um (womit er seine stabile Gleichgewichtslage einnimmt). Was ihn aufrecht hält ist sein Drehimpuls. Denn der bleibt konstant, solange keine äußere Kraft wirkt
(1. Newtonsches Axiom), behält also Richtung und Betrag bei. Er beginnt zu taumeln, wenn der Drehimpulsvektor nicht mehr in seiner Symmetrieachse liegt (bzw. sein Schwerpunkt über dem Auflagepunkt). Ursache sind typisch Ungleichmäßigkeiten seiner Gewichtsverteilung und / oder Unebenheiten des Untergrundes.
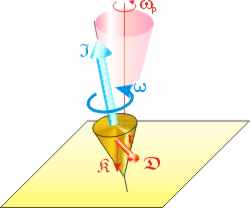 Betrachten wir den Zustand des Taumelns, wenn also der Drehimpulsvektor
nicht mehr in der Rotationsachse des Kreisels liegt. Sobald die Rotationsachse des Kreisels geneigt ist, wirkt auf seinen Schwerpunkt die Erdanziehungskraft, die ein
Drehmoment 𝕯 erzeugt.
Betrachten wir den Zustand des Taumelns, wenn also der Drehimpulsvektor
nicht mehr in der Rotationsachse des Kreisels liegt. Sobald die Rotationsachse des Kreisels geneigt ist, wirkt auf seinen Schwerpunkt die Erdanziehungskraft, die ein
Drehmoment 𝕯 erzeugt.
Die Kraft 𝕶 ist die am Schwerpunkt ansetzende Schwerkraft, 𝖗 der Abstand des Schwerpunktes von der senkrechten Linie über dem Stützpunkt des Kreisels. Die Kraft 𝕶 ist das Produkt aus Masse M und Fallbeschleunigung 𝖌: 𝕶 = M · 𝖌. Der Zahlenwert der Kraft ist also:
- D = M · g · r.
Dieses Drehmoment 𝕯 steht senkrecht auf dem Drehimpuls des Kreisels und verursacht eine zeitliche Änderung der Richtung des Drehimpulses (die Änderung des Drehimpulses ist in Richtung des Drehmoments!). Als Folge präzidiert der Kreisel, d.h. seine Rotationsachse beschreibt einen Kegel. Die Präzisionsfrequenz ωp ist abhängig vom Drehmoment und dem Drehimpuls des Kreisels:
Die Präzision ist schneller, wenn das Drehmoment größer ist (z.B. wenn die Neigung zunimmt), sie ist langsamer, wenn der Drehimpuls des Kreisels größer ist. Da der Kreisel durch Reibung Energie verliert (der Drehimpuls nimmt ab) und somit langsamer wird (der Drehimpuls nimmt ab!), nimmt die Präzisionsgeschwindigkeit zu bis er umkippt.
In Vektorschreibweise ist der Zusammenhang in der Formel beschrieben:
Es gelten für die Richtungen die Regeln des Rechtssystems von Vektorprodukten. (Mittelfinger in Richtung Drehimpulsvektor, Daumen in Richtung Drehmoment, dann zeigt der Zeigefinger die Richtung der Präzision an.)
Der Radeffekt
Beim Anfahren unter Motor stellt sich ein unangenehmer Effekt des Drehimpulses ein: das Boot dreht sich um seine Achse! Nicht nur Anfänger haben ihre Schwierigkeiten mit diesem "Radeffekt", wenn sie rückwärts eine Liegestelle ansteuern.
Was passiert? Wenn der Steuermann Gas gibt, beschleunigen sich die Rotationen des Motors, der Schraubenwelle und der Schraube. Da diese Teile, wenn sie rotieren, einen Drehimpuls haben, ändert sich der Drehimpuls des Schiffes. Diese Drehimpulsänderung erzeugt ein Drehmoment, das senkrecht zum Drehimpuls steht. Und dieses Drehmoment dreht das Schiff.
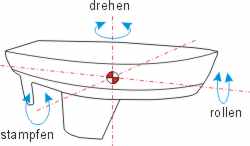 Das Schiff hat im Raum drei senkrecht aufeinander stehende Achsen um die es drehen kann: die Längsachse, die Querachse und die Achse in Richtung Erdmittelpunkt. Die drei Achsen schneiden sich im Drehpunkt des Schiffes (dieser Drehpunkt muss bei einem stabil schwimmenden Schiff oberhalb des Massenzentrums liegen). Die genaue Lage des Drehpunktes ist für ein schwimmendes Schiff schwer theoretisch zu berechnen (Formstabilität!).
Das Schiff hat im Raum drei senkrecht aufeinander stehende Achsen um die es drehen kann: die Längsachse, die Querachse und die Achse in Richtung Erdmittelpunkt. Die drei Achsen schneiden sich im Drehpunkt des Schiffes (dieser Drehpunkt muss bei einem stabil schwimmenden Schiff oberhalb des Massenzentrums liegen). Die genaue Lage des Drehpunktes ist für ein schwimmendes Schiff schwer theoretisch zu berechnen (Formstabilität!).
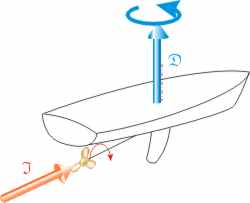 Die drehenden Teile einer "rechtsdrehenden Schraube" haben bei Vorwärtsfahrt einen Drehimpuls 𝕴, der in Fahrtrichtung gerichtet ist. Wenn beschleunigt wird, ist die Änderung des Drehimpulses in die gleiche Richtung. Das aus dieser Änderung resultierende Drehmoment 𝕯 hat eine Richtung, die aus dem Vektorprodukt der Ableitung und der rechten Handregel folgt. Man deutet den Zeigefinger zum Zentrum der drehimpulserzeugenden Rotation, den Daumen in Richtung des Drehimpulses, und der Mittelfinger zeigt die Richtung des Drehmoments. Das Schiff dreht im Gegenuhrzeigersinn (das Heck geht nach rechts). Bei Rückwärtsfahrt ist der Drehimpuls vom Bug weg gerichtet, das aus der Beschleunigung resultierende Drehmoment ist entgegengesetzt, und das Schiff dreht im Uhrzeigersinn (Heck nach links). Soweit stimmt das mit der Beobachtung und der Merkregel ("als würde die Schraube auf dem Grund laufen") überein.
Die drehenden Teile einer "rechtsdrehenden Schraube" haben bei Vorwärtsfahrt einen Drehimpuls 𝕴, der in Fahrtrichtung gerichtet ist. Wenn beschleunigt wird, ist die Änderung des Drehimpulses in die gleiche Richtung. Das aus dieser Änderung resultierende Drehmoment 𝕯 hat eine Richtung, die aus dem Vektorprodukt der Ableitung und der rechten Handregel folgt. Man deutet den Zeigefinger zum Zentrum der drehimpulserzeugenden Rotation, den Daumen in Richtung des Drehimpulses, und der Mittelfinger zeigt die Richtung des Drehmoments. Das Schiff dreht im Gegenuhrzeigersinn (das Heck geht nach rechts). Bei Rückwärtsfahrt ist der Drehimpuls vom Bug weg gerichtet, das aus der Beschleunigung resultierende Drehmoment ist entgegengesetzt, und das Schiff dreht im Uhrzeigersinn (Heck nach links). Soweit stimmt das mit der Beobachtung und der Merkregel ("als würde die Schraube auf dem Grund laufen") überein.
An der Berechnung bin ich gescheitert. Zwar kann man den Drehimpuls der Schraube (Durchmesser 30 cm, Gewicht 10 kg) bei 600 Umdrehungen pro Minute (10 pro Sekunde) mit einem Ring von 10 cm Durchmesser annähern und erhält einen Drehimpuls von 0,25 N·m, der sich von 0 innerhalb von 10 sec aufbaut. Aber die Effekte der Welle und besonders des Motors sind für mich nicht abzuschätzen. Klar ist jedoch, dass es keines großen Drehmoments bedarf, das Schiff um die senkrechte Achse zu drehen (kann man bei einem ruhig liegenden Schiff durch Drücken am Bug leicht überprüfen).
Bleiben wir beim qualitativen. Da der Motor immer im Gegenuhrzeigersinn dreht (die Drehrichtung der Schraube wird mit einem Getriebe umgekehrt), ist der Radeffekt bei Rückwärtfahrt geringer (die Drehimpulse des Motors und der Welle/Schraube sind entgegen gerichtet). Versuchen Sie 'mal rückwärts "auf dem Teller" zu drehen.
Die Änderung des Drehimpulses hängt ab von der Zeit in der die Drehzahl geändert wird. Beim sanften Gasgeben dreht das Schiff langsamer, beim Kavalierstart schneller (leicht zu überprüfen).
Der Außenborder hat den Motor (und die Welle) senkrecht eingebaut; damit erzeugt er beim Gasgeben ein Drehmoment, das das Boot um die Längsachse dreht (was sich nur schwach bemerkbar macht). Beim V-Antrieb ist der Motor entgegen der Fahrtrichtung eingebaut: seine Drehimpulsänderung und die der Schraube/Welle sind entgegengesetzt und heben einander teilweise auf (der Radeffekt ist geringer).
|
|
© Rainer Stumpe URL: http://www.rainerstumpe.de |