Ebene Trigonometrie Kegelschnitte Die Ellipse
Sphärische Trigonometrie
Einführung
Die Geometrie der Dreiecke auf der Kugeloberfläche hat viele Analogien mit der Trigonometrie in der Ebene, die wesentlich von Euklid zusammengefaßt worden ist. So finden die Geraden in der Ebene ihre Entsprechung in den Kreisen auf der Kugeloberfläche, deren Mittelpunkt mit dem Kugelmittelpunkt zusammenfält (Großkreise). Großkreise werden durch zwei Punkte eindeutig bestimmt, das Großkreissegment zwischen den beiden Punkten ist die kürzeste Entfernung und Kugeldreiecke werden durch die Schnittpunkte dreier Großkreise gebildet. Anders als Geraden in der Ebene haben Großkreise aber eine endliche Länge (den Kugelumfang), es gibt keine parallelen Großkreise und die Winkelsumme im sphärischen Dreieck ist größer als 180° (2·π) aber kleiner als 540° (6·π).
Da eines der Axiome der Euklidischen Geometrie — das Parallelenaxiom — nicht gilt, ist die sphärische Geometrie ein Beispiel für eine nicht-Euklidischen Geometrie.
Da bereits die griechischen Astronomen und Mathematiker von einer kugelförmigen Erde und einer Himmelskugel ausgegangen sind, liegt es nahe, dass sie sich mit der Geometrie auf der Kugeloberfläche auseinander gesetzt haben. Nach [1] stammt die älteste Schrift zur Kugelgeometrie ("Über die sich bewegende Kugel") von Autolykos (330 v. Chr.). Von Menelaos (um 100 n. Chr.) wird erstmals das Kugeldreieck diskutiert. Indische und arabische Astronomen forschten auf dem Gebiet, und um das Jahr 1000 entdeckten arabische Mathematiker den Sinussatz und lösten alle Augaben im sphärischen Dreieck.
Die Wiener Mathematiker Georg von Peurbach und Regiomontanus griffen die griechischen und arabischen Schriften zur Kugelgeometrie wieder auf. Regiomontanus schrieb seine Forschungen in fünf Büchern "De triangulis" zusammen (1462-1464), und gab damit wesentliche Impulse für die Entwicklung der Wissenschaften in der Renaissance.
Der schottische Mathematiker John Napier (latinisiert Neper(ius)) veröffentlichte 1614 ein Lehrbuch ("Mirifici Logarithmorum Canonis Constructio") zur Berechnung der Gleichungen in der sphärischen Trigonometrie, wozu er die Logarithmen der Winkelfunktionen einführte. Sein Schüler Edmung Gunter schrieb 1623 das erste Buch in englischer Sprache zur Verwendung der sphärischen Trigonometrie und der Logarithmen der Sinus- und Cosinuswerte in der Navigation. Es wurde als Standardlehrbuch von der englischen Marine eingeführt, und erschien in vielen — auch von Dritten überarbeiteten und ergänzten — Auflagen. Damit war die sphärischen Trigonometrie im Kanon der Bildung angekommen. Sie blieb ein Bestandteil der Allgemeinbildung bis kurz vor dem Beginn meiner Gymnasialzeit.
Grundlagen
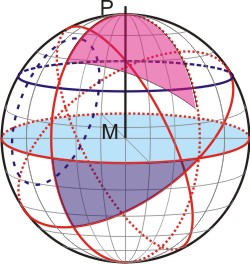
Im Bild rechts sind Kreise auf der Kugeloberfläche eingezeichnet. Zwei Arten Kreise werden unterschieden: Kreise, die den Kugelmittelpunkt M auch zu ihrem Mittelpunkt haben, nennt man Großkreise (rot). Alle anderen sind Kleinkreise (blau). Ein Großkreis entsteht, wenn man eine Kugel in zwei gleich große Hälften teilt. Das Lot auf der Ebene dieses Großkreises durchstößt die Kugel im Pol P. Alle Großkreise, die durch den Pol gehen (Meridiane) schneiden den halbierenden Großkreis (Äquator) im rechten Winkel. Die Ebene des Großkreises und der Pol bilden das Koordinatensystem, das Navigatoren kennen.
Drei Großkreise bilden ein sphärisches (Kugel-)Dreieck. (Da es keine parallelen Großkreise gibt, muß aus drei Großkreisen ein Kugeldreieck entstehen.) Ein sphärisches Dreieck aus dem Äquator und zwei Meridianen hat eine Winkelsumme von mindestens 180°, da die Meridiane beide den Äquator mit einem Winkel von 90° schneiden, hinzu kommt im sphärisches Dreieck der Winkel, den die Meridiane am Pol einschließen. Dieser Winkel kann — in einem Eulerschen Kugeldreieck — maximal 180° betragen. Das so gebildete Dreieck hat also eine Winkelsumme von 360°. Folgende Sätze gelten im sphärischen Dreieck:
- Ein sphärisches Dreieck kann mit seinem Gegendreieck nur dann zur Deckung gebracht werden, wenn es zwei gleiche Seiten hat.
- Im sphärischen Dreieck liegen gleiche Seiten gleichen Winkeln gegenüber.
- Im sphärischen Dreieck liegt der größten Seite der größte Winkel gegenüber.
- Im sphärischen Dreieck ist eine Seite kleiner als die Summe der beiden anderen.
- Im sphärischen Dreieck ist die Summe der drei Seiten kleiner als 360°.
- Im sphärischen Dreieck ist die Summe der drei Winkel größer als 360° und kleiner als 540°.
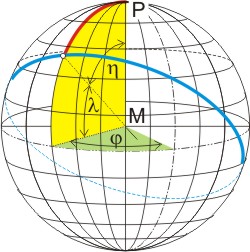
Etwas ungewohnt an der sphärischen Trigonometrie ist, dass in den Formeln nicht nur die Dreieckswinkel, sondern auch die Dreiecksseiten in Bogengrad angegeben werden. (Zur Unterscheidung werden Dreieckswinkel mit kleinen griechischen Buchstaben bezeichnet, die Dreiecksseiten mit kleinen lateinischen.) Das ist möglich durch die Verwendung des Bogenmaßes auf einer Kugel mit dem Radius 1. Die Länge eines Kreissegments auf einem Großkreis entspricht dann dem Winkel, unter dem man den Bogen vom Mittelpunkt aus sieht. Der rote Bogen im Bild links ist also η° lang. Gemessen wird in der Ebene des Großkreis (hier gelb). Auf der Erdkugel wäre er η° · 60 Seemeilen lang. Auf anderen Kugeln mit dem Durchmesser d [km] wäre er (η° ⁄ 360°) ·π · d [km] lang.
Denn — der Navigator erinnert sich — die Seemeile ist als Bogenminute auf einer Kugel mit dem mittleren Erddurchmesser definiert. Das macht Entfernungsangaben in Seemeilen einfach: man braucht nur die Großkreisbogenlänge zu bestimmen.
Zur Bestimmung von Entfernungen und Richtungen gibt es in der sphärischen Trigonometrie wie in der ebenen Rechenregeln und Formeln. Wie in der ebenen Trigonometrie gibt es für das Kugeldreieck Vereinfachungen beim rechtwinkligen Dreieck, außerdem gibt es noch das Poldreieck, in dem einige Formeln übersichtlicher werden. Die Formeln werden in der terrestrischen Navigation und besonders in der Astronavigation verwendet.
Das Poldreieck

Das sphärische Poldreieck hat den Pol des Kugelkoordinatensystems als eine seiner Ecken. Daraus folgt, dass zwei seiner Seiten Meridiane sind, die den Äquator im rechten Winkel schneiden. (☞ Achtung: nur der Äquator ist von den Breitenkreisen ein Großkreis!)
Der Dreieckswinkel ∠APB = γ am Pol (er liegt der Seite c gegenüber) ergibt sich einfach aus der Längendifferenz der Punkte A und B. Mit dem Hilfsdreieck (hier grün), dessen eine Kathete parallel zum Äquator liegt, sind die Berechnungen aller Seiten und Winkel möglich. Diese Kathete des grünen Dreiecks ist gleichzeitig eine Seite des gleichschenkligen Dreiecks mit dem Pol als der gegenüberliegenden Ecke. Die andere Kathete ist der Komplementärwinkel der Breite φB, bzw. die Breitendifferenz φA - φB der beiden Punkte A und B. Eine Anwendung ist die Berechnung des Kurses auf der kürzesten Verbindungslinie zwischen zwei Punkten: der Orthodrome.
In der reinen Lehre der sphärischen Trigonometrie gibt es noch das "Polardreieck" und das "rechtseitige" Dreieck (in Ergänzung zum rechtwinkligen). Beide scheinen nur theoretische Bedeutung für den Beweis von Lehrsätzen zu haben. Eine Bedeutung in der Navigation habe ich nicht gefunden.
Das rechtwinklige sphärische Dreieck

Am Beispiel eines rechtwinkligen sphärischen Dreiecks lassen sich die Zusammenhänge recht übersichtlich darstellen. Das rote Dreieck in der Abbildung rechts hat den rechten Winkel am Punkt C, denn dort schneidet ein Meridian den Äquator. Vom Mittelpunkt M der Kugel mit dem Radius r = 1 sieht man alle Dreiecksseiten unter dem Winkel, der ihrer Länge entspricht.
(Der Umfang U einer Kugel mit dem Radius r = 1 ist ein (Groß-)Kreis mit dem Umfang U = 2·r·π. Da r = 1 ist, gilt U = 2·π = 360°, und ein Kreissegment (z. B. b = AC) hat den Bruchteil b ⁄ 2·π am Gesamtumfang, der dem Bruchteil des Winkels b am Mittelpunkt M vom Gesamtumfang U = 2·π entspricht.)
Legt man in der Ecke B des sphärischen Dreiecks ABC zwei Tangenten an die Kugel, so definiert man eine Ebene BFG. In einer weiteren zu BFG parallelen Ebene liege die Ecke A, und in einer dritten parallelen Ebene liege C. Die drei Ebenen schneiden die Verbindungslinien des Kugelmittelpunkts M mit den drei Ecken des sphärischen Dreiecks ABC, und man erhält drei ähnliche Dreiecke, die zusätzlich rechtwinklig sind: ADE, HCI und FGB. Mit ihrer Hilfe und den Keildreiecken mit dem Mittelpunkt der Kugel als eine der Ecken kann man die Formeln zur Berechnung der Stücke im sphärischen Dreieck herleiten.
- Mit dem Dreieck ADE:
Im rechtwinkligen Dreieck AEM mit den Katheten AE und EM und der Hypotenuse MA = 1 ist der Winkel ∠AME = c, und damit (aus der Definition der Sinusfunktion) die Kathete AE = sin c, und die andere Kathete ME = cos c. Ebenso erhalten wir aus dem Dreieck ADM (Hypotenuse AM = 1): AD = sin b und DM = cos b. Das Dreieck DEM hat den rechten Winkel bei E (der Radius durch den Berührungspunkt steht auf der Tangente senkrecht) und die Hypotenuse DM = cos b. Das heißt: DE = cos b · sin a und ME = cos b · cos a. Nun hat man zwei Beziehungen für ME, die man gleichsetzen kann:
- cos c = cos b · cos a
- oder in Worten:
- Im rechtwinkligen sphärischen Dreieck ist der Cosinus der Hypotenuse gleich dem Produkt der Cosinusse der Katheten.
Damit ist es gelungen, nur durch Überlegungen an ebenen Dreiecken eine Beziehung der Seiten eines rechtwinkligen sphärischen Dreiecks auf der Kugel mit dem Radius r = 1 abzuleiten. Man nennt sie — weil sie so einfach ist — auch den sphärischen Pythagoras.
- Mit dem Dreieck HCI:
Im Dreieck HCI ist die Strecke CI = sin a die Kathete des rechtwinkligen Dreiecks CIM, dessen Hypotenuse MC = 1 (Einheitsradius). Im rechtwinkligen Dreieck HCM ist CH die Kathete, CM = 1 die andere Kathete, und HM die Hypotenuse. Es gilt: sin b = CH ⁄ HM und cos b = CM ⁄ HM. Diese beiden Gleichungen werden durcheinander dividiert: sin b ⁄ cos b = (CH · HM) ⁄ (CM · HM). HM kann man kürzen, und sin b ⁄ cos b = tan b. Da CM = 1 erhält man tan b = CH.
- Mit dem Dreieck FGB
Im Dreieck FGB ist die Kathete BG = sin a. Mit den Mittelpunktsdreiecken BMG und FMB erhält man analog zu 2.: BG = tan a und FB = tan c.

Um zu Beziehungen der Winkel im sphärischen Dreieck zu kommen, betrachten wir das ebene blaue Dreieck ADE in der vereinfachten Abbildung rechts. Der Winkel bei A im ebenen Dreieck entspricht dem Winkel bei A im sphärischen: ∠BAC ≑ ∠EAD ≑ α (weil für die Längen der Katheten in den rechtwinkligen Dreiecken gilt: AC = AD = b und CB = DE = a, wobei a und b die Winkel am Mittelpunkt M sind). Und da im ebenen rechtwinkligen Dreieck die Winkelsumme 180° beträgt, ist auch ∠ABC ≑ ∠AED ≑ β (denn ∠ACB = ∠ADE = 90°).
Nun bemühen wir wieder die Definition der Winkelfunktionen im rechtwinkligen ebenen Dreieck, und wählen die Definition der Tangensfunktion: tan β = AD ⁄ DE. Die Länge der beiden Katheten kennen wir aus der Herleitung des "sphärischen Pythagoras" oben auf der Seite: AD = sin b und DE = cos b · sin a. Das eingesetzt in die Tangensdefinition ergibt: tan β = (sin b) ⁄ (cos b · sin a) = (sin b ⁄ cos b) ⁄ sin a = tan b ⁄ sin a.
Mit der Gleichung
- tan β = tan b ⁄ sin a
ist die Beziehung eines Winkels im rechtwinkligen sphärischen Dreieck zu den Längen der beiden Katheten hergestellt. Die gleichen Argumente kann man für den Winkel α anwenden. Man erhält so einen Satz von Gleichungen, mit denen man die Elemente im rechtwinkligen sphärischen Dreieck berechnen kann, wenn man nur zwei kennt.
Dieser Satz Gleichungen wurde von John Neper zusammen mit einer Merkregel und optimiert für die Berechnungen mit der Logarithmentafel (und damit auch für den Rechenschieber!) im Jahr 1641 publiziert. Wir verzichten hier auf die ausführliche Herleitung und wenden uns dem schiefwinkligen sphärischen Dreieck zu.
Die Nepersche Regel
im rechtwinkligen sphärischen Dreieck
Der schottische Mathematiker John Napier (latinisiert Neper), 1550-1617, publizierte 1614 ein Lehrbuch zur sphärischen Trigonometrie, in dem er die Logarithmen der Sinuswerte entwickelte Mirifici Logarithmorum Canonis Constructio. Die Logarithmenrechnung erleichtert die Multipikation und Division der typisch fünfstelligen Zahlenwerte. Er war der Lehrer von Edmund Gunter, der das wohl erste Buch zur ebenen und sphärischen Trigonometrie und ihrer Anwendung in der Navigation in englischer und nicht in lateinischer Sprache schrieb.
John Napier stellte eine leicht zu merkende Regel zum Aufstellen von Formeln für die Berechnung des rechtwinkligen spärischen Dreiecks auf: Neper´sche Regel (Propositiones quaedam eminentissimae ad Triangula shpaerica, mira facilitate resolunda. enthalten in: Mirifici Logarithmorum Canonis Constructio, Paris 1620).

Im nebenstehenden Dreieck soll der Punkt C der Scheitel des Grosskreises durch B und C sein. Der Winkel γ ist dann ein rechter (90°). Dieses "rechtwinklige Poldreieck" ist für die Großkreisnavigation und in der Astronavigation wichtig. Deshalb nennt man es auch das "Navigationsdreieck".
Wie in der ebenen Trigonometrie reicht die Kenntnis von drei Stücken des Dreiecks (je drei Winkel und Seiten) um alle anderen berechnen zu können. In rechtwinkligen Dreieck ist ein Winkel schon bekannt: γ = 90°, man braucht also nur noch 2 weitere zu kennen.
Mit einem Satz Formeln kann man die Probleme lösen — ähnlich den Grundproblemen des rechtwinkligen Dreiecks. Neper hat für diesen Satz eine einfache Merkregel aufgestellt.

Man ebnet das spärische Dreieck ein und benennt Winkel und Seiten in der üblichen Weise (Ecken: große Buchstaben, Seiten: den kleinen Buchstaben der gegenüberliegenden Ecke, Winkel: kleine griechische Buchstaben, die der Eckenbezeichnung entsprechen). Dann schreibt man sie in einer Reihe auf, sodass man nicht über die Ecke C gehen muss:
- a* β c α b* oder b* α c β a*.
Dabei bedeutet der *, dass man für die Katheten statt des Winkels dessen Komplement (a* = 90° - a bzw. b* = 90° - b) nehmen muss.
Neper´sche Regel
- Im rechtwinkligen spärischen Dreieck ist der Cosinus eines jeden Stückes
- gleich dem Produkt der Cotangenten der anliegenden,
- oder
- gleich dem Produkt der Sinusse der nicht anliegenden Stücke.
- (der rechte Winkel gilt nicht als Stück)
Aus der Neper´sche Regel ergeben sich 10 Formeln zur Berechnung des rechtwinckligen sphärischen Dreiecks. Man muss nun nur noch feststellen, welche der Stücke man kennt und welches man berechnen will. Wie man das macht, soll kurz gezeigt werden, weitere Anwendungsbeispiele gibt es bei der Wegpunktberechnung für die Grosskreisnavigation.
Anwendungsbeispiel
Bei vielen Problemen der terrestrischen und der astronomischen Navigation erleichtert man sich die Berechnung, in dem man ein rechtwinkliges (Pol-)Dreieck konstruiert. Man fällt vom Pol aus ein Lot auf einen (schiefliegenden) Großkreis und nennt den Fußpunkt den Scheitel des Großkreises. In der Astronavigation wäre das der Kulminationspunkt der Gestirnsbahn.
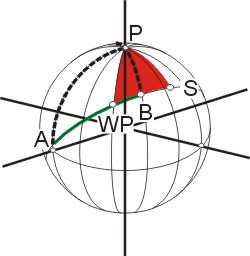
In der terrestrischen Großkreisnavigation berechnet man den Abstand eines Punktes WP auf der Fahrtlinie (grün) vom Startpunkt A oder B indem man die Entfernungen vom Startpunkt zum Scheitel von der Entfernung des WP vom Scheitel abzieht. Bekannt sind die Breiten und Längen von Scheitel und Startpunkt und er Kurswinkel am Startpunkt (α bzw. β). |

In der Astronavigation berechnet man im Prinzip den Abstand eines Sternenortes vom Himmelsnordpol (Zenith) aus der (bekannten) Zeit, die seit der Kulmination über dem Null-Meridian verstrichen ist und der bekannten Kulminationshöhe des Sterns (aus einer Tabelle). (Man sieht übrigens schön, dass man auch den Zeitpunkt des Sternenauf- und Unterganges für die Standortbestimmung verwenden kann.) |
|
In beiden Fällen rechnet man aber in einem rechtwinkligen Poldreieck, es läßt sich also zur Herleitung der Formeln die Neper´sche Regel anwenden. |
|
GroßkreisnavigationIm Dreieck BPS sind bekannt die Seitenlängen PB und PS und der Dreieckswinkel bei B (180° - β). Gesucht ist die Seite BS. Nach Neper nennen wir BS = a, (180° - β) = β, den PB = c, den Winkel am Pol = α, die Seite PS = b. Da gesuchte Stück a und die bekannten Stücke c und b "liegen nicht an", also ergibt sich die Formel: cos (90° - a) = sin c · sin (90° - b) |
AstronavigationHier gehen wir analog vor und nennen die Seite (Kulmi&nationspunkt - Sternenort) = a, den Dreieckswinkel beim Sternenort = β, die Seite (Zenit - Sternenort) = c, den Winkel am Zenith = α, die Seite (Zenith - Kulmi&nationspunkt) = b. Hier wird der Winkel α eingeschlossen von den beiden Seiten c und b, die Formel lautet also: cos α = cot c · cot(90° - b) |
|
Beide Formeln sehen ungewohnt aus. Nun ja, man braucht noch ein bißchen Winkelfunktionsarithmetik, um zu der Rechenregel zu kommen. Aber wir sehen: man kann die Formeln ableiten und braucht sie nicht zu memorieren. Und solange das Wetter schön ist, gibt es ja auf dem Segelschiff genügend Zeit um sie abzuleiten. Wenn das Wetter nicht gut ist, sieht man sowieso keine Sterne und dann kann man ja immernoch das GPS verwenden. |
|
Das schiefwinklige sphärische Dreieck
Das schiefwinklige sphärische Dreieck, in dem kein Winkel größer ist als 180° (Eulersches Dreieck), wird von Navigatoren gerne vermieden, denn die Formeln verursachen einen größeren Rechenaufwand als das rechtwinklige. (In der Astronavigation ist das leider nicht zu vermeiden, denn die grafische Lösung der Aufgaben durch Konstruktion der Projektion in die Ebene ist nicht genau genug.) Auch gibt es — bis auf den Seitensinussatz im schiefwinkligen sphärischen Dreieck — keinen einfachen Merksatz. Wir wollen aber den Formelsatz ableiten, vielleicht hilft es ja beim Erinnern — außerdem ist es nicht so schwer, denn die Herleitung folgt im Prinzip der für das rechtwinklige sphärische Dreieck.
Der Seitensinussatz im schiefwinkligen sphärischen Dreieck

Es sei M der Mittelpunkt auf einer Kugel mit dem Radius r = 1, und das Dreieck ABC ein sphärisches auf der Kugekoberfläche, d. h. die Seiten a, b und c des Dreiecks liegen auf Großkreisen der Kugel. Man fällt das Lot mit dem Fußpunkt D von der Dreiecksecke A auf die Fläche des Kreissegments MBC, das Lot mit dem Fußpunkt F von A auf den Radius MC, und das Lot (Fußpunkt E) auf MB. Dann verbindet man die Fußpunkte D, E, F in der Segmentebene (blaue Linien). Man erhält so zwei ebene rechtwinklige Hilfsdreiecke ADF und ADE (der rechte Winkel ist jeweils am Punkt D).
Da wir uns mit der Einheitskugel beschäftigen, entsprechen die Seitenlängen des sphärischen Dreiecks den Winkeln, die am Mittelpunkt von den (punktierten) Verbindungslinien zu den Dreiecksecken eingeschlossen wird. Damit ist im ebenen rechtwinkligen Dreieck AFM die Länge der Kathete AF bekannt: AF = sin b (die Hypothenuse AM = 1!). Und im ebenen Dreieck AEM gilt ebenso: AE = sin c. Diese beiden Seiten sind aber die Hypothenusen in den ebenen blauen Dreiecken. In diesen Dreiecken sind auch die Winkel ∠AED = β und ∠AFD = γ bekannt. Also ist die gemeinsame Kathete AD = sin c · sin β = AD = sin b · sin γ.
In dieser Gleichung bingt man die Sinusse der Seiten b und c auf die eine Seite, und die Sinusse der Winkel β und γ auf die andere: (sin c) ⁄ (sin b) = (sin γ) ⁄ (sin β). Den selben Formalismus kann man auch mit den anderen Ecken des sphärischen Dreiecks durchspielen. Am Ende erhält man:
- sin a : sin b : sin c = sin α : sin β : sin γ
- oder in Worten:
- In einem (Eulerschen) sphärischen Dreieck verhalten sich die Sinusse der Seiten wir die Sinusse der zugehörigen Winkel.
Dem aufmerksamen Besucher dieser Website wird dir Ähnlichkeit zum Sinussatz in der ebenen Trigonometrie auffallen. Statt der Seiten im ebenen Dreieck stehen beim sphärischen die Sinusse der Seiten im Verhältnis zu den Sinussen der Winkel.
Der Seitencosinussatz im schiefwinkligen sphärischen Dreieck
Analog zur ebenen Trigonometrie gibt es auch einen Seitencosinussatz für das sphärische Dreieck.

Wir müssen zur Herleitung noch ein paar Hilfsdreiecke in die Abbildung einzeichnen. Durch das Lot von G auf MB mit dem Fußpunkt G entsteht das ebene Dreieck MFG, und mit dem Lot von D auf FG mit dem Fußpunkt H entsteht das Dreieck HFD. Im Dreieck AEM ist die Strecke EM die Ankathete des Winkels ∠AME = c, die Hypotenuse MA = r = 1. Also ist EM = cos c. Im Dreieck AMF führt die analoge Überlegung zu MF = cos b. MF ist aber die Hypothenuse im Dreieck FGM, in dem der Winkel ∠FMG = a. Also ist die Ankathete MG = cos a · cos b.
Im Dreieck FDH ist der Winkel ∠DFH = a (weil die Schenkel paarweise aufeinander senkrecht stehen: FG ⊥ BM und FD ⊥ CM). In diesem Dreieck brauchen wir noch die Hypothenuse DF, die wir aus dem Dreieck ADF erhalten: AF = sin b und der Winkel ∠AFD = γ, also ist DF = sin b · cos γ. Die Strecke ME ist die Ankathete zu ∠c im Dreieck AEM, also ME = cos c (die Hypothenuse AM = r = 1!).
Gleichzeitig ist ME = MG + EG. MG kennen wir schon, und EG = DH (weil FG und DE parallel sind). Im Dreieck DFH kennen wir die Hypothenuse DF = sin b · cos γ und den Winkel ∠DFH = a, also ist die Gegenkathete EG = DH = sin a · sin b · cos γ. Aus dem Ausdruck ME = MG + EG erhalten wir durch Einsetzen: ME = cos a · cos b + sin a · sin b · cos γ = cos c. Die analoge Argumentation für die anderen Seiten führt zum Seitencosinussatz:
- cos a = cos b · cos c + sin b · sin c · cosα
- cos b = cos c · cos a + sin c · sin a · cosβ
- cos c = cos a · cos b + sin a · sin b · cosγ
Der Winkelcosinussatz im schiefwinkligen sphärischen Dreieck
Der Winkelcosinussatz kann auf ähnliche Weise wie der Seitencosinussatz abgeleitet werden (unter Verwendung des Polardreiecks). Wir verzichten hier allerdings auf die Herleitung, weil er in der Navigation keine Rolle spielt.
- cos α = - cos β · cos γ + sin β · sin γ · cos a
- cos β = - cos γ · cos α + sin γ · sin α · cos b
- cos γ = - cos α · cos β + sin α · sin β · cos c
Die Hauptaufgaben im schiefwinkligen sphärischen Dreieck
Im Abschnitt "ebene Trigonometrie" hatten wir die Berechnungsmethoden für alle Kombinationen von gegebenen und gesuchten Stücken des schiefwinkligen Dreiecks ausgeführt. Die Aufgaben kommen in der Praxis des Navigators eigentlich nur bei der Astronavigation vor.
- Gegeben sind die drei Seiten a, b, c eines sphärischen Dreiecks, gesucht sind die drei Winkel α, β und γ.
Zur Lösung werden die Formeln der Seitencosinussatzes nach den Cosinussen der Winkel aufgelöst: - Gegeben sind die drei Winkel α, β und γ eines sphärischen Dreiecks, gesucht sind die drei Seiten a, b, c.
Die Aufgabe wird mit dem Winkelcosinussatz gelöst und liefert eine eindeutige Lösung, wenn jede Seite kleiner ist als die Summe der beiden anderen und die Summe der Winkel zwichen 180° und 540° liegt. Wir lösen die drei Gleichungen des Winkelcosinussatzes nach den Cosinussen der Seiten a, b, c auf, und erhalten drei Formeln, die als Variablen nur die drei Winkel enthalten. - Gegeben sind zwei Seiten a und b und der dazwischen liegende Winkel γ, gesucht sind c, α und β.
Die Aufgabe wird mit dem Seitencosinussatz und dem Sinussatz gelöst. Hier wird nur die Seite c mit dem Seitencosinussatz eindeutig berechnet. Die Winkel ergeben nach dem Sinussatz eine oder zwei Lösungen.- Nach dem Seitencosinussatz gilt:
- cos c = cos a · cos b + sin a · sin b · cos γ

- Aus dem Sinussatz ergeben sich durch Umformen:
- sin α = (sin a · sin γ) ⁄ sin c
- und
- sin β = (sin b · sin γ) ⁄ sin c
Da die Sinusfunktion (blau) im Bereich bis 180° für zwei verschiedene Winkel den gleichen Funktionswert liefert, gibt es je zwei Lösungen für α und β. Die Cosinusfunktion wechselt im Bereich das Vorzeichen. Daraus folgt: man muss das Vorzeichen beachten und erhält dann eindeutige Lösungen.
-
Gegeben sind 2 Winkel α, β und und die eingeschlossene Seite c, gesucht sind a, b, γ.
Der Winkel γ ergibt sich nach dem Winkelcosinussatz eindeutig:- cos γ = - cos α · cos β + sin α · sin β · cos c
- Die beiden Seiten berechnet man mit dem Sinussatz:
- und
-
Gegeben sind zwei Seiten a, b und ein Gegenwinkel α, gesucht sind c. β, γ.

- Der Winkel β wird mit dem Sinussatz berechnet: sin β = (sin b · sin α) ⁄ sin a.
-
Um die Seite c und den Winkel γ zu berechnen, muss das schiefwinklige sphärische Dreieck ABC durch die sphärische Höhe hC (die liegt auf einem Großkreis durch die Ecke C) in zwei rechtwinklige Dreiecke ACD und DCB zerlegt werden (die Seite c wird in zwei Teile c1 und c2, der Winkel γ in γ1 und γ2 geteilt). Man erhält im Dreieck ACD aus den gegebenen Stücken b und α:
- tan c1 = tan b · cos α
- cot γ = tan α · cos b
- tan c2 = tan a · cos β
- cot γ2 = tan β · cos a






Anwendungen der sphärischen Trigonometrie
Die Großkreisnavigation
Die kürzesten Verbindungslinie zwischen zwei Punkten A und B auf der Kugel liegt auf einem Großkreis. Die Fahrt auf der Orthodrome ist also die kürzeste Route von A nach B. Dieser Großkreis — sofern er nicht der Äquator oder ein Breitenkreis ist — schneidet jeden Meridian unter einem anderen Winkel. Das hat den Nachteil, dass man ständig den Kurs wechseln muss.
Mit dem Pol bilden die beiden Punkte A unf B ein — in aller Regel schiefwinkliges — sphärisches (Pol-)Dreieck ABC, denn die Punkte A und B liegen auf Meridianen. Wenn man die Koordinaten der Punkte A und B kennt, sind die Seiten a und b bekannt und der eingeschlossene Winkel γ (das ist der Längenunterschied von A und B) gegeben, und die Seite c und die Winkel α und β sind gesucht. Das ist die Hauptaufgabe III im sphärischen Dreieck. Also kann die Seite c nach der Formel
- cos c = cos a · cos b + sin a · sin b · cos γ
berechnet werden. Die Winkel berechnet man analog der Hauptaufgabe I im schiefwinkligen sphärischen Dreieck:
Wenn man also von A nach B segeln will, sind der Startkurs α und der Ankunftskurs β bekannt. Aber wie findet man die Schnittwinkel in den Punkten D und E auf der Orthodrome mit den zwichen A und B liegenden Meridiane? In den Hauptaufgaben V und VI beim schiefwinkligen sphärischen Dreieck haben wir den Trick kennen gelernt: man erzeugt aus einem schiefwinkligen Dreieck zwei rechtwinklige, indem man die sphärische Höhe h von einer Ecke aus einzeichnet. Sie hat den Fußpunkt S, und ist die Höhe in jedem beliebigen Dreieck, das C und S als zwei seiner Ecken hat, und dessen dritte Ecke auf dem Großkreis der Orthodrome liegt. Mit der Verwendung von rechtwinkligen sphärischen Dreiecken werden die Berechnungen einfacher.
Zunächst aber müssen die Koordinaten des Scheitelpunktes gefunden werden. Das ist mit der Neperschen Regel recht einfach. Im Dreieck ASC mit dem rechten Winkel bei S (∢CSA) werden die Stücke angeordnet: AS* α AC γ CS* (der Winkel ∢ACS ist γ im Dreieck ACS!). Bekannt sind AC und α, also nicht-anliegende Stücke zum gesuchten Bogen CS. Man erhält für den Komplementärwinkel der Scheitelbreite die Formel:
- cos CS* = sin AC · sin α = sin CS = sin AC · sin α
- Und als Formel für die Scheitellänge AS:
- cos γ = cot c · cot CS*
Die Berechnung an einem Beispiel wird im Abschnitt Navigation ausgeführt.
Die Berechnung der Tageslänge
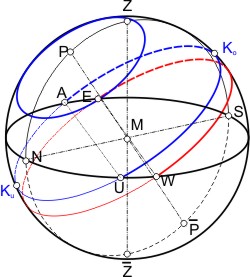
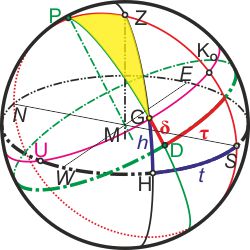
Die Sonne — und die Sterne — bewegen sich von der Erde ausgesehen auf Kreisen um einen imaginären Punkt. Die größte Höhe über dem Horizont erreicht die Sonne etwa zu Mittag (außer wenn gerade "Sommerzeit" angesagt ist). Die Tageslänge hängt von der Jahreszeit ab. In der Abbildung ist der sphärisch-trigonometrische Zusammenhang vereinfacht dargestellt (der Durchmesser der Erde ist hier vernachlässigt, d. h. der "wahre" Horizont fällt mit dem "scheinbaren" zusammen).
Der Beobachter steht im Mittelpunkt M der Himmelskugel, über ihm ist der Zenith Z und der Himmel trifft auf den Horizont, der das Gesichtsfeld begrenzt. Die Horizontebene ist ein Großkreis, der auf der Achse MZ senkrecht steht. Die Sterne bewegen sich im Verlaufe eines Tages auf Kleinkreisen (hier blau) mit den Mittelpunkten auf der Achse MP, der Weltachse. Die Großkreisebene senkrecht zur Weltachse ist der Himmelsäquator (hier rot). Der höchste Punkt der Sternenbahn vom Beobachter aus gesehen, ist der (obere) Kulminationspunkt KO, der die Südrichtung (S) definiert. "Westen" (W) ist rechts vom Beobachter, der nach Süden blickt, "Osten" (E) links, und "Norden" (N) liegt hinter ihm. Alle Sterne gehen im Osten auf (Aufgangspunkt A) und im Westen unter (Untergangspunkt U).
In der Abbildung sind zwei durch je eine Großkreisebene und ihre senkrechte Mittelachse definierte Koordinatensysteme enthalten: das Horizontsystem und das Reaktaszensionssystem. In beiden Koordinatensystemen ist jedoch die Südrichtung als Bezugspunkt in der Großkreisebene festgelegt. Damit sind die Systeme durch den Großkreis durch P und Z mit einander verbunden.
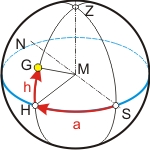
Aus historischen Gründen muß eine Nomenklatur eingeführt werden (die unterschiedlichen Bezeichnungen beziehen sich auf das jeweilige Koordinatensystem). Im Horizontsystem misst man den Winkel zwischen dem Großkreis durch den Zenith Z, auf dem der Stern G steht, und dem Meridian, der durch den Südpunkt geht, von Süd nach Westen von 0° bis 360°. (Es gibt auch andere Konventionen!) Man nennt diesen Winkel Azimuth a. Der Winkel zwischen dem Äquator und dem Stern G heißt Höhe h. Der Azimuth a gibt die Richtung an, in der die Sonne steht, gemessen vom OrtsMeridian.
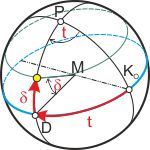
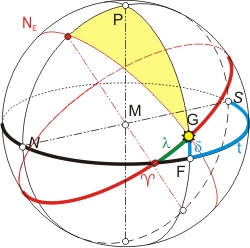
Auf den ersten Blick sieht die Abbildung rechts aus wie die oben links. Sie stellt aber ein anderes Koordinatensystem dar: das Rektaszensionssystem. Der blaue Großkreis ist hier der Himmelsäquator, die darauf senkrecht stehende Achse durchstößt die Himmelskugel im Himmelspol. Der Winkel zwischen dem Meridian, auf dem der Stern steht, und dem der oberen Kulmination des Sterns heißt hier der Stundenwinkel t oder die Rektaszension α, und der Winkel vom Äquator zum Pol heißt Deklination δ des Sterns. Im Rektaszensionssystem bewegt sich der Stern auf einem Kleinkreis parallel zum Äquator. Der Meridian der oberen Kulmination ist die Südrichtung im Horizontsystem. Der Stundenwinkel gibt die Zeit seit der Kulmination an, er kann in Grad umgerechtet werden, weil der Vollkreis mit 360° in 24 Stunden (= 1 Tag) durchlaufen wird. Ein Stundenwinkel von 1 Stunde entspricht deshalb 360° ⁄ 24 h = 15 ° ⁄ h. Da die Deklination δ eines Sterns von der irdischen Zeit — in erster Näherung — unabhängig ist, kann man für jeden Stern die Deklination, also den Abstand von der Äquatorebene, in einer Tabelle angeben. (Da gegenüber dem Durchmesser der Sonnenbahn der Erddurchmesser nicht vernachlässigbar ist, ändert sich die Deklination der Sonne täglich! Sie kann im ekliptikalen Koordinatensystem berechnet werden.)
Legt man nun das Horizontsystem und das Rektaszensionssystem so übereinander, dass die Mittelpunkte zusammenfallen und der Pol P des Rektaszensionssystem (blau) auf dem Südmeridian (rot) des Horizontsytems (schwarz) liegt, erhält man die nebenstehende Abbildung. Das gelb gefüllte Dreieck PZG ist das "Navigationsdreieck"; es ermöglicht die beobachteten Höhe h des Sternenorts G in Beziehung zu setzen mit der Tageszeit t und dessen Deklination δ, denn die Seite PG liegt im Rektaszensionssystem, die Seite ZG im Horizontsystem und die Seite PZ in beiden.
Die halbe Tageslänge ist der Winkelabstand des Südmeridians S vom Untergangspunkt U. Gesucht ist also eine Formel für den Winkel ∢SPG = t, wenn G = U. Bekannt sind im Navigationsdreieck: die Länge des Kreisbogens PZ, das ist der Komplementärwinkel der geografischen Breite φ des Beobachters im Horizontsystems: PZ = 90° - φ. Die Länge der Seite GZ ist der Komplementärwinkel der Höhe h: GZ = 90° - h (im Untergangspunkt wird sie Null sein). Die Länge der Seite GP ist der Komplementärwinkel der Deklination δ: PG = 90° - δ. Der Winkel am Pol, ∢ZPG, ist der gesuchte Stundenwinkel t, und der Winkel am Zenith, ∢PZG = 180° - a (es ist der Ergänzungswinkel zu ∢HZS, dem Azimuth!).
- Die bekannten Stücke sind:
- PZ = 90° - φ
- GZ = 90° - h
- GP = 90° - δ
- Das gesuchte Stück ist:
- ∢GPZ = τ
Zur Berechnung der Stücke im Navigationsdreieck verwendet man den Seitencosinussatz im schiefwinkligen sphärischen Dreieck, denn man kennt die drei Seiten (1. Hauptaufgabe):
- cos a = cos b · cos c + sin b · sin c · cos α
Setzt man nun die Stücke ein:
- a = ZG = 90° - h
- b = PZ = 90° - φ
- c = PD = 90° - δ
- α = ∢GPZ = t
erhält man:
- cos (90° - h) = cos (90° - φ) · cos (90° - δ) + sin (90° - h) · sin (90° - φ) · cos t
und mit sin (90° - α) = cos α und cos (90° - α) = sin α
- sin h = sin φ · sin δ + cos h · cos δ ·cos t
Diese Gleichung wird nun aufgelöst nach cos t:
Wenn — bei Sonnenauf- und untergang — h = 0 und sin h = 0 und cos h = 1 sind, vereinfacht sich die Formel zu:
Mit dieser Formel hat die kaiserliche deutsche Marine nach dem Lehrbuch der Navigation von 1906 die Kompassmissweisung bestimmt. Der Winkel t der Untergangsrichtung wurde bestimmt, wenn die Sonne 4 ⁄ 5 ihres Durchmessers über dem Horizont steht. (Wegen der Refraktion der Atmosphäre!)
Die Deklination der Sonne
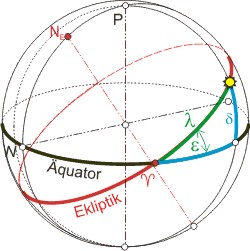
Zur Berechnung der Deklination δ der Sonne muß ein weiteres Koordinatensystem eingeführt werden: das Ekliptikale System. Die Ekliptik ist die Ebene, auf der die Planeten auf Ellipsen um die Sonne kreisen. Die Ebene ist gegenüber dem Himmelsäquator um ε = 23° 27′ geneigt. Ihre Achse durchstößt die Himmelskugel im ekliptikalen Nordpol Nε. (Der Himmelsäquator fällt ja mit dem der Erde zusammen, ebenso die Erdachse mit der Weltachse, die die Himmelskugel im (Nord-)Pol P durchstößt.) Da auch die Mittelpunkte des Äquatorsystems und des Ekliptiksystems zusammen fallen, schneiden sich die beiden Ebenen (die Schnittlinie geht durch den gemeinsamen Mittelpunkt M). Und da die Kugel ja den "Einheitsradius 1" hat, gibt es zwei Schnittpunkte der Schnittlinie mit der Himmelskugel: den Frühlingspunkt ^ und den Herbstpunkt d. Vereinbarungsgemäß zählt man den Winkel auf der Ekliptik von Frühlingspunkt aus entgegen dem Uhrzeigersinn.
Legt man das Ekliptikalsystem so auf das Äquatorsystem, dass die Mittelpunkte zusammenfallen und der Pol der Ekliptik Nε auf dem Mittagsmeridian liegt, erhällt man die nebenstehende Abbildung. Der Abstand der Sonne G vom Frühlingspunkt ist die ekliptikale Länge λ der Sonne, der Abstand δ die Deklination der Sonne. Sie nimmt von Frühlingspunkt ^ mit wachsender Länge λ zu bis zum Maximum am Sommersonnenwendepunkt, dann wieder ab bis zum Wintersonnenwendepunkt. Die Berechnung von δ in Anbhängigkeit von λ berechnent man im Dreieck ^FG, in dem der ∢G^F = ε und ∢^FG = 90° (alle Großkreise durch den Pol schneiden alle Meridiane im rechten Winkel). Es gilt Die Seiten eines allgemeinen Dreiecks verhalten sich wie die Sinuswerte der den Seiten gegenüberliegenden Winkel.
Da sin 90° = 1 ergibt die Umformung:
- sin δ = sin λ · sin ε
Oben wurde erwähnt, dass sich die Deklination der Sonne täglich ändert. Das wird an der Abbildung verständlich. Am Frühlingspunkt ^ ist δ = 0 und die Mittagshöhe der Sonne h☉ = ε und der Tag hat 12 Stunden. (Ist leicht mit den oben abgeleiteten Formeln für δ = 0 zu berechnen.) Nun werden die Tage länger, bis die Sonne den oberen Punkt ihrer Bahn erreicht hat; δ = ε. Dieser Punkt liegt 90° vom ^-Punkt entfernt. Da die Sonne den ^-Punkt nach einem vollen Umlauf von 360° wieder erreicht und dabei ein Jahr (zu 365,2472 = 365 d 5 h 56 m (Sonnen-)Tagen) vergangen ist, ist das ¼ Jahr nach dem Frühlingspunktdurchgang. Es entspricht also ein Tag einem Fortschreiten der Sonne auf ihrer ekliptischen Bahn um 0,9856° Mit diesem Wert kann man die Deklination δ für jedes Datum berechnen, wenn man weiss, wann der Durchgang durch den Frühlingspunkt war — leider nicht mit dem Rechenschieber, denn man muss bei einer Genauigkeit von einer Minute mit 4 Stellen nach dem Komma rechnen.
Leider ist die Wirklichkeit nicht so ideal. Man muss den ^-Punkt jährlich bestimmen. Im Jahr 2014 war der Zeitpunkt am 20. März um 17:57 h MEZ, und 2021 wird er am 20. März um 10:37 MEZ sein. Die Gründe werden auf Astronomie-Sites ausführlich erklärt.
 Wie Kepler in seinem 2. Gesetz postulierte, bewegt sich die Erde auch nicht mit gleichmäßiger Geschwindigkeit auf einer Kreisbahn um die Sonne. Definiert man den Sonnentag als Zeitdifferenz zwischen zwei Meridiandurchgängen der Sonne, und den Sternentag ebenso bezogen auf Meridiandurchgänge eines Fixsterns, so ist der Sonnentag jahreszeitabhängig kürzer oder läger als der Sternentag. Denn die Erde bewegt sich auf ihrer elliptischen Bahn um die Sonne umso schneller, je näher sie der Sonne steht (2. Keplersches Gesetz). Dies ist leicht zu korrigieren: man führt einen mittleren Sonnentag ein, der dem konstanten Umlauf der Sonne auf der Äquatorebene entspricht. Das reicht dann für die Zeitmessung im täglichen Leben. Nicht aber für die Navigation, denn der wahre Sonnentag kann bis zu ¼ Stunde länger oder kürzer sein als der mittlere. Man muss also einen Parameter zum Ausgleich erfinden. In dem kann man dan komfortabel alle Einflüsse zusammenfassen, die auf die Umlaufgeschwindigkeit der Erde einen Einfluss haben: neben der elliptischen Form auch die Anziehungskräfte der anderen Planeten, des Mondes, etc. Diesen Zeit-Ausgleichsparameter nennt man Zeitgleichung:
Wie Kepler in seinem 2. Gesetz postulierte, bewegt sich die Erde auch nicht mit gleichmäßiger Geschwindigkeit auf einer Kreisbahn um die Sonne. Definiert man den Sonnentag als Zeitdifferenz zwischen zwei Meridiandurchgängen der Sonne, und den Sternentag ebenso bezogen auf Meridiandurchgänge eines Fixsterns, so ist der Sonnentag jahreszeitabhängig kürzer oder läger als der Sternentag. Denn die Erde bewegt sich auf ihrer elliptischen Bahn um die Sonne umso schneller, je näher sie der Sonne steht (2. Keplersches Gesetz). Dies ist leicht zu korrigieren: man führt einen mittleren Sonnentag ein, der dem konstanten Umlauf der Sonne auf der Äquatorebene entspricht. Das reicht dann für die Zeitmessung im täglichen Leben. Nicht aber für die Navigation, denn der wahre Sonnentag kann bis zu ¼ Stunde länger oder kürzer sein als der mittlere. Man muss also einen Parameter zum Ausgleich erfinden. In dem kann man dan komfortabel alle Einflüsse zusammenfassen, die auf die Umlaufgeschwindigkeit der Erde einen Einfluss haben: neben der elliptischen Form auch die Anziehungskräfte der anderen Planeten, des Mondes, etc. Diesen Zeit-Ausgleichsparameter nennt man Zeitgleichung:
- wahre Zeit = mittlere Zeit + Parameter.
Die Deklination δ der Sonne über dem Himmelsäquator kann man mit der oben abgeleiteten Formel sin δ = sin λ · sin ε einfach berechnen. Die Umlaufzeit der Erde um die Sonne (gemessen zwischen den beiden Kulminationen der Sonne an zwei Tagen, die in aufeinander folgenden Jahren das gleiche Datum haben) beträgt 365 Tage 6 h 9 m 9,54 s (365,25636 d). Das entspricht einem Umlaufwinkel von 360°. Pro Grad Fortschritt auf der Bahn braucht die Erde also 1,014601 Tage (1 d 21 m 1,526 s), oder pro Tag legt sie 0,98561° zurück. Wir können also den Ort der Erde für jede Zeit auf ihrer Umlaufbahn durch den Winkel λ beschreiben. Dazu müssen wir nur wissen, wann der Frühlingspunkt ^ passiert wurde und wieviele Tage seit diesem Zeitpunkt verstrichen sind. Das gelingt mit dem Julianischen Datum, wenn man weiß, wann der Durchgang der Sonne durch den Frühlingspunkt stattfand. Im Jahr 2016 fand das am 20. März um 05:30 h statt. Nun müssen wir zunächst die Julianischen Daten der bürgerlichen ausrechnen. Nehmen wir das Datum, an dem wir λ bestimmen wollen als den 05.08.2016 an, der Sonnenstand soll für 12:00 h UTZ bestimmt werden.
Die Formel zur Umrechnung des bürgerlichen in das julianische Datum JD lautet:
- JD = J · 365,2422 + (M + 1) · 30,6001 + S + T + UT ⁄ 24 + 1.720.996,5
- dabei ist:
- Monat 1 oder 2 (Januar oder Februar): J = JJJJ - 1 und M = MM + 12
- Monat größer als 2: J = JJJJ, M = MM
- Anzahl der Schalttage S = (ganzzahliger Teil J ⁄ 100) - (ganzzahliger Teil J ⁄ 400)
- T ist das Tagesdatum
| 20.03.2016 05:30 h | 05.08.2016 12:00 h | |
| J | 2016 | 2016 |
| M | 4 | 9 |
| S | 20 - 5 = 15 | 20 - 5 = 15 |
| UT | 5,5 | 12 |
| JD | 2.457.472,4048 | 2.457.610,6761 |
| Diff. | 138,2713 d = 138 d 6 h 30 m 43,2 s ≙ 136,2868° | |
Die Sonne ist auf ihrer Bahn also 136,2868° vom Frühlingspunkt ^ entfernt.
Zur Berechnung der Höhe δ der Sonne über dem Äquator (Deklination) benutzt man das rechtwinklige sphärische Dreieck mit den Seiten λ und δ und dem Winkel ε. Die Formel lautet:
- sin δ = sin λ · sin ε
Mit dieser Formel berechnet man die Deklinationstabellen. Die Korrektur der Zeitgleichung bringt man beim Julianischen Datum an.
Dieser Rechengang setzt voraus, dass die Schiefe der Ekliptik ε konstant sei. Exakt gilt das nur in begrenzten Zeiträumen, da die Neigung der Erdachse relativ zur Bahnebene vielen Einflüssen unterliegt, die Teils von Planetenkonstellationen, teils von Masseverschiebungen auf der Erde beeinflusst werden (sieh z. B. die Überlegungen zum Milanković-Zyklen). Besonders lustig ist es, wenn Astroarchäologen versuchen, diese Formeln über mehrere Jahrtausende anzuwenden.
Rechenbeispiele zum nautischen Dreieck
Berechnung der Tageslänge
Am 1. Mai 2014 beträgt die Deklination der Sonne δ = 15° 8′ 48,7″ = 15,1469°. Für Leipzig (φ = 51° 20′ = 51,33°, λ = 12° 22′ = 12,36°) sollen die Länge des Tages und die Richtung der Aus- und Untergänge berechnet werden.
Die Formeln wurden bereits abgeleitet. Zunächst wird der Stundenwinkel im Äquatorsystem berechnet nach der Formel:
- cos t = -tan φ · tan δ
Mit dem Rechenschieber geht das besonders einfach.
Man stellt den Strich des Läufers über den Wert φ = 51,33° auf der Tangensskala T2 (die beginnt bei 45° und endet bei 84,3 ) und verschiebt die "1" der Zungenskala C unter den Läuferstrich. Nebenbei erfährt man, dass tan 51,33° = 1,49. (Das braucht man nicht zu merken!)

Nun verschiebt man den Läufer über den Wert δ = 15,15° auf der Skala T1 (von 5,5° bis 45°) und liest auf der Körperskala D tan δ = 0,2707. Diese Zahl merkt man sich und stellt den Läufer über 0,271 auf der Zungenskala C.

Das Produkt tan φ · tan δ = 0,3383 kann man auf der Körperskala D ablesen, braucht es aber nicht! Denn der Läufer steht ja schon richtig, um auf der Skala "S" den zum cos t gehörenden Winkel (von rechts nach links!) abzulesen: t = 70,23°.
Da der Wert des cos t negativ war, ist der gefundene Wert der Ergänzungswinkel des gesuchten. Also: t = 180° - 70,23° = 109,77°. Diesen Winkel dividieren wir durch 15 °⁄h und erhalten für die halbe Tageslänge: 7,318 Std. Der Tag am 1. Mai 2014 in Leipzig ist also 14 h 38 m 9,6 s. Schneller geht es nicht — jedenfalls wenn man keine allzu große Genauigkeit braucht.
Mit der halben Tageslänge kann man auch den Zeitpunkt des Sonnenauf- und untergangs angeben. Da die Sonne zu Mittag (= 12 h Ortszeit OZ) kulminiert, liegt der Sonnenaufgang 7 h 19 m vorher, also um 4:41 h OZ, und der Untergang um den gleichen betrag später um 19 h 38 m OZ. Zur Umrechnung in die MEZ muss berücksichtigt werden, dass Leipzig 2,8° westlich des 15. Meridians liegt, auf den die Zonenzeit bezogen ist. Das heisst, die Ortszeit unterscheidet sich von der MEZ um 13 Minuten. Um diesen Betrag verschieben sich die Auf- und Untergangszeiten.
Die Website APPER.de bietet — neben anderen — den Service der interaktiven Tageslängenberechnung. Das Ergebnis dort für den gleichen Ort und Tag: 14 h 50 m. Der Unterschied dürfte darin beründet sein, dass hier von der Kreisbahn um die Sonne ausgegangen wird, auf der sich die Erde gleichmäßig bewegt. Das ist nicht so. Vielmehr ist die Erdbahn eine Ellipse und die Bahngeschwindigkeit hängt von der Stellung zur Sonne ab — wie Johannes Kepler beweisen konnte. Außerdem geht die hier dargestellte Berechnung davon aus, dass zwischen zwei Sonnenkulminationen genau 24 h vergehen. Auch das ist nicht so. (Ausführliche Erklärungen findet man auf beliebigen Astronomie-Sites.)
Richtung des Sonnenauf- und untergangs
Mit der zweiten Formel findet man die Himmelsrichtung des Sonnenauf- und -untergangs.
- da bei Sonnenauf- und untergang h = 0 und sin h = 0:

Diese Aufgabe löst man am Bestem mit dem Navigator-Rechenschieber von Unique, da man mit dem Winkelfunktionen dividieren kann. Man stellt den Läuferstrich auf der S1-Skala auf dem Körper über d = 15,15° = 15° 09′, und mit der Zungenskala S2 den Wert f = (90° - 51,33°) = 38,7° = 38° 42′ unter den Läuferstrich: dann liest man über "100" auf der Körperskala S1 direkt den Winkel (90° - t) = 24° 24′ = 24,4° ab. Also t = 65,6°.
Die Sonne geht also am 1. Mai bei 65,6° auf (etwas nördlicher als Ost), und sie geht bei (360° - 65,6°) = 294,4° unter (etwas nördlicher als West).
Berechnung der Deklination der Sonne
Zur Berechnung der Deklination der Sonne reicht die Genauigkeit des Rechenschiebers leider nicht aus: man kann ja auf maximal 4 signifikante Stellen rechnen. Das entspräche etwa 10 Bogenminuten. Wir setzen zur Veranschaulichung den "Navigator" von Unique ein. (Achtung; die Winkelskalen sind in Grad und Minuten eingeteilt!)
- sin δ = sin λ · sin ε
- λ = 136,2869°
- ε = 23,5° = 23° 30′
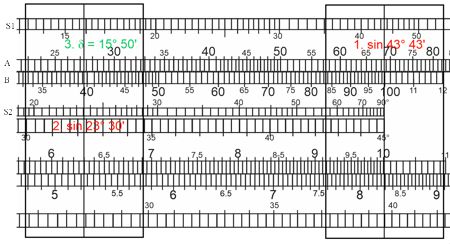
Da die Sinusskala des Rechenschiebers nur bis 90° anzeigt, wenden wir die Phasenregel an: sin (180° ± α) = sin αa, und stellen mit dem Läufer den Wert 180° - 136,2869° = 43,7131° = 43° 43′ auf der S1-Skala ein. Unter den Läuferstrich schieben wir die 10 der Zunge, und verschieben den Läufer auf 23° 30′ auf der Skala S2. Auf S1 lesen wir den Wert der Deklination d = 15° 50′ für den 05.08.2016 ab. Der wahre Wert dürfte bei 16° ± 30′ liegen.
Die konstruktive Lösung der Aufgaben im sphärischen Dreieck

Die Aufgaben im sphärischen Pol-Dreieck ABC kann man grafisch durch Konstruktion der senkrechten Parallelprojektion der Kugel und des sphärischen Dreiecks in die Ebene lösen. Dazu legt man die Ebene (blau), in die die Punkte auf der Kugel projiziert werden sollen, durch den Mittelpunkt M der Kugel und durch zwei Punkte B, C des sphärischen Dreiecks (die ja auf einem Großkreis liegen). Durch den Punkt A des sphärischen Dreiecks legt man zwei Kleinkreise ABB′ und ACC′, die jeweils die Verbindungslinie des Kugelmittelpunktes M mit einer der beiden anderen Ecken als Achse haben. Wegen der Kugelsymmetrie bleiben die Großkreisbogenlängen AB und AC gleich, wenn man um die Achsen MB bzw. MC "dreht". Man kann also die Großkreisbögen in die Projektionsebene drehen. Das sphärische Dreieck ABC ist nun unter Beibehaltung der Seitenlängen "eingegebnet". Auch die sphärischen Winkel des Poldreiecks kann man in die Ebene projizieren.

Dazu dreht man den Kleinkreis ABB′ durch A um seine Achse BB′ in die blaue Ebene. Dabei bleibt der Winkel ∠AMB erhalten und kann in der Ebene als Winkel ∠A′MB abgelesen werden.
Praktisch schlägt man einen Kreis mit dem Durchmesser BB′ um den Mittelpunkt M′ des Kleinkreises, errichtet dann auf BB′ das Lot durch A und findet im Schnittpunkt des Lots mit dem Projektionskreis A′.
Der Winkel γ = ∠AM′B (gelb) ist gleich dem Winkel γ = ∠A′M′B (grün), den man in der Projektionsebene leicht ablesen kann. In der Navigation entspräche dieser Winkel der geografischen Länge, mit B als Mittagspunkt.

In analoger Weise erhält man den ∠AMC = β durch Umklappen des Kleinkreises CAC′ durch A, dessen Achse durch B geht: β = CMA′.

Etwas aufwändiger ist die Projektion des Winkels α = ∠CAB zu konstruieren. Er wird durch die beiden Tangenten an die Großkreise AC und AB in A eingeschlossen. Diese beiden Tangenten AT1 und AT2 schneiden die Achsen der Kleinkreise ABB′ und ABB′ in den Punkten T1 bzw. T2. Man dreht sie um die Achsen MC bzw. MB in die Projektionsebene: AT1 ⇒ B′T1 und AT2 ⇒ C′T2. Damit erhält man die Punkte T1 und T2 durch die Tangente an den Großkreis in den Punkten B′ und C′. Das Dreieck AT1T2 wird nun in die Projektionsebene gedreht, indem man um T1, T2 die Kreise mit den Radien AT1 = B′T1 bzw. AT2 = C′T2 schlägt. Am Schnittpunkt A′ in der Projektionsebene wird der Winkel α gefunden.
Konstruktionsbeispiel

Als erstes zeichnet man einen (Rand-)Kreis, markiert dessen Mittelpunkt M und zieht das Achsenkreuz durch den Mittelpunkt. Auf dem Randkreis trägt man die Kreissegmente a und b ab, die der Länge (d. i. dem Winkel am Mittelpunkt M) der gegebenen Dreiecksseiten entsprechen. Die Spur des Kleinkreises durch die Ecke A des Dreiecks parallel zur x-Achse schneidet den Kreis in einer der Dreiecksseiten (hier D). Die Projektion des Mittelpunktes M1 findet man als Schnittpunkt mit der Achse des Kreises. Über der Spur des Kleinkreises mit dem Mittelpunkt M1 zeichnet man den Thales-Kreis. Am Mittelpunkt M1 trägt man den gegebenen Winkel γ an, und verlängert den Schenkel bis zum Schnittpunkt A′ mit dem Thales-Kreis. Von A′ fällt man das Lot suf die Spur des Kleinkreises und erhält die Projektion der dritten Dreiecksecke A auf die Zeichenebene.
Nun verbindet man den Mittelpunkt des Kreises mit der zweiten gegebenen Ecke des sphärischen Dreiecks (hier B) und verschiebt das Lot auf diese Strecke bis es A und den Kreis in F und G schneidet. Die Strecke zwischen den Kreisschnittpunkten ist die Spur des zweiten Kleinkreises mit dem Mittelpunkt M2, über der man einen Thales-Kreis mit M2 als Mittelpunkt errichtet. In A errichtet man ein zweites Lot auf diesen Kleinkreis, und verbindet dessen Schnittpunkt A″ mit dem Thales-Kreis mit dem Mittelpunkt des Kleinkreises. Hier liest man den gesuchten Winkel β = 68,1° ab. Gleichzeitig hat man die Länge der dritten Seite c = 42,2° des sphärischen Dreiecks gefunden: es ist der Kreisbogen zwischen B und dem Berührungspunkt F des zweiten Kleinkreises mit dem Kreis.
Die beiden Tangenten an die beiden Kleinkreise, die den Winkel α einschließen, konstruiert man als Senkrechte zum Kreisradius in den Ecken des sphärischen Dreiecks D und F. Ihre Schnittpunkte T1 und T2 mit den Achsen der Kleinkreise sind die Mittelpunkte zweier Kreise, deren Schnittpunkt A′″ die Projektion der Dreiecksecke A ist. Der Winkel zwichen den Verbindungsgeraden ist der gesuchte Winkel α = 84,6°.
Das Ergebnis hängt überwiegend von der Zeichengenauigkeit ab — wie man durch Nachrechnen dieser III. Hauptaufgabe im schiefwinkligen sphärischen Dreieck leicht feststellen kann, ist es nicht bahnbrechend.
© Rainer Stumpe, URL: www.rainerstumpe.de/
Datenschutzerklärung