Sphär. Trigonometrie Kegelschnitte Die Ellipse
Ebene Trigonometrie
Die Entwicklung der Trigonometrie
Die Ursprünge der Trigonometrie (von griechisch trigon = Dreieck) liegen im Dunkel der Geschichte. Verwendet wurde sie (als ebene Trigonometrie) von Baumeistern und (als sphärische Trigonometrie) von Astronomen. Die Bibel berichtet von den Chaldäern Gruppe aramäischer Stämme, seit dem 9. Jh. v. Chr. im südlichen Babylon bezeugt. als Astronomen. Es gab in Babylon Tabellen der Daten von Sonnen- und Mondfinsternissen. Die Ägypter besaßen sicherlich trigonometrische Kenntnisse für die Ausführung der Bauten, haben aber wohl eher geometrische Konstruktionen entwickelt. Sie benutzten für das Verhältnis der Seitenlängen ihrer Bausteine das Wort Seqt, das den Cosinus bezeichnet. Die Griechen gingen die Mathematik systematisch an (Euklid griechischer Mathematiker; um 300 v. Chr.; wichtiges Werk zur Geometrie, Apollonius griechischer Mathematiker, geb. 262 v. Chr. in Perga; Kegelschnitte, aber der Astronom Aristarch griechischer Astronom, geb. um 310 v.Chr. auf Samos, gest. um 230 v. Chr.; Begründer des heliozentrischen Weltbildes hat als erster die Eigenschaften des rechtwinkligen Dreiecks zur Berechnung der Entfernungen von Sonne, Mond und Erde von einander eingesetzt. Hipparch griechischer Astronom, nach 127 v. Chr. und Theodosius um 50 v. Chr. haben zuerst die Sehnen des Kreises zur Bestimmung des Zentriwinkels benutzt. Das Weltbild des Ptolemäus griechischer Methematiker und Astronom, geb um 100 n. Chr. in Ägypten, mit der Bewegung der Planeten in Kreisbahnen um die Erde machte es nötig, Kreisbogenlängen und Winkel zu berechnen. Ptolemäus griechischer Mathematiker und Astronom, geb um 100 n. Chr. in Ägypten, führte das durch Betrachtung von Kreissehnen durch (Satz des Ptolemäus).
Die chaldäischen und die griechischen Erkenntnisse wurden von den Indern weiter entwickelt. Aryabhata indischer Mathematiker und Astronom, geb. 21.03.476 in Kusumapura,, Brahmaputra indischer Mathematiker, 598 - 660 und Bhaskara indischer Mathematiker und Astronom, 600 - 680führten die halben Sehnen als Funktion des halben Winkels ein und schufen so die Sinus-Trigonometrie. Arabische Mathematiker traten die Erbschaft der Griechen und Inder an und entwickelten Berechnungsmethoden. Al Battani bedeutendster islamischer Astronom des Mittelalters, geb. vor 859 in Harran (Irak), gest. 929 bei Samarra. nutzte die indische Sinusfunktion und führte die Begriffe Kotangente und Sekante ein. Abu′l Wafa 940 - 998 persischer Astromon und Mathematiker in Bagdad; führte die Tangensfunktiuon ein und stellte die trigonometrischen Sätze und ihre Beweise zusammen. Dschabir Ibn Afla spanisch-arabischer Astromon und Mathematiker, 1100 - 1160 unterschied vier Hauptfälle in der ebenen Trigonometrie. Der persische Astronom Eddin Nasir Tusi persischer Astromon, 1201 - 1274 betrieb die Trigonometrie als selbstständige Wissenschaft. Er behandelte schiefwinklige Dreiecke mit dem Sinussatz.
Italienische Kaufleute benutzten das trigonometrische Wissen der Araber seit dem 13. Jh. für die Navigation bei Handelsfahrten. Ihre Kenntnisse ließen sie gesuchte Navigatoren für die portugisischen Forschungsreisen des 14. Jh. an der Westküste Afrikas sein. Regiomontanus′ zusammenfassendes Werk war die Grundlage für die Entwicklung einer Navigation für die Entdeckungsfahrten des 15. Jh.
Im 15. Jh. wurde die Trigonometrie in Europa gefördert, wohl wegen ihrer Bedeutung in der Navigation und Vermessung (Geodäsie). RegiomontanusJohannes Müller, Mathematiker und Astronom, geb. 06.06.1436 in Königsberg/Unterfranken, schrieb eine vollständige ebene und sphärische Trigonometrie auf der Basis islamischer Werke. Damit löste sich die Trigonometrie von der ägyptischen Konstruktion (z. B. beim Kathedralenbau) und wurde in der Tradition der Chaldäer und Araber zur Rechenmethode. Nachdem Johannes Kepler 1609 seine Gesetze der Planetenbewegung publiziert hatte, schrieb John NeperJohn Napir Laird of Merchiston, schottischer Mathematiker, geb. 1550 (1620 posthum erschienen) eine Anleitung zur Berechnung der Aufgaben im shärischen Dreieck, wobei er die von ihm entwickelten Logarithmen der Sinuswerte zur Vereinfachung der Rechnungen entwickelte. Richtig zum Durchbruch kam die shärische Trigonometrie durch Edmund Gunterenglischer Mathematiker, geb. 1581′ dessen Bücher erstmalig in englicher (und nicht wie damals üblich in lateinischer) Sprache die ebene und die sphärische Trigonometrie erklärte und die Neperschen Logarithmen nicht in lateinischer Sprache einer breiten Öffentlichkeit zugänglich machte. Das ermöglichte der englischen Marine, nicht-adlige Kapitäne in Navigation auszubilden, und schließlich die Seeherrschaft zu erlangen.
Die heute noch verwendete systematischen Nomenklatur und Symbolik stammt von Leonhard EulerSchweizer Mathematiker, geb. 15.04.1707 in Basel,.
- Quellen: H. Lieber, F. von Lühmann, Leitfaden der Elementarmathematik, 1912.
- Dictionary of the History of Science, Macmillan, 1981.
- Brockhaus Enzyklopädie, 2000.
- Helmut Gericke: Mathematik in Antike, Orient und Abendland. Fourier Verlag, 2003.
Über Winkel und Dreiecke
Das typische Lehrbuch der Geometrie beginnt mit der Erklärung der Begriffe Punkt, Gerade, Strahl und Strecke, und der Definition ihrer Eigenschaften. Das schenke ich mir hier. Das folgende Kapitel des Lehrbuchs beschäftigt sich dann mit dem Winkel.
Winkel
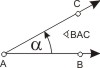
Zwei von einem Punkt ausgehende Strahlen bilden einen Winkel. Die beiden Strahlen werden Schenkel genannt, der gemeinsame Punkt A der beiden Strahlen heißt Scheitel des Winkels. Winkel werden mit kleinen griechischen Buchstaben symbolisiert, oder man bezeichnet einen Winkel mit drei Buchstaben ∠BAC, wobei der mittlere Buchstabe den Scheitel des Winkels angibt. Winkel werden in (Bogen-)Grad (Symbol: °) gemessen, wobei der Vollkreis in 360° geteilt ist.
Nach der Anzahl Grad, die der Winkel einschließt, unterscheidet man:
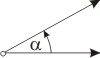 spitzer Winkel, α < 90° |
 rechter Winkel, α = 90° |
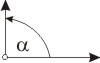
stumpfer Winkel, α > 90° |
|
gestreckter Winkel, α = 180° |
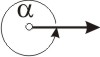
überstumpfer Winkel, α > 180° |
 Vollwinkel, α = 360° |
Supplementwinkel, Nebenwinkel, Scheitelwinkel
Zwei Winkel, die den Scheitel und einen Schenkel gemeinsam haben und deren Summe 180° beträgt, heißen Supplementwinkel (Ergänzungswinkel). Es gilt: α + β = 180°
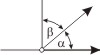
Zwei Winkel, die den Scheitel und einen Schenkel gemeinsam haben und deren Summe 90° beträgt, heißen Nebenwinkel oder komplementäre Winkel. Es gilt: α + β = 90°

Durch die Verlängerung beider Schenkel eines Winkels über den Scheitel hinaus entstehen vier Winkel. Die beiden Verlängerungen schließen den Scheitelwinkel von α ein. Gegenüberliegende Scheitelwinkel sind gleich. Es gilt: α + β = 180°
Winkel an Parallelen

Zwei Geraden in einer Ebene, die sich nicht schneiden, heißen Parallelen. Werden zwei Parallelen von einer dritten Geraden geschnitten, so sind:
- die gleichliegenden Winkel gleich (α1 = α2 und β1 = β2),
- die Ergänzungswinkel (α, β) an Parallelen betragen zusammen 180°,
- die Wechselwinkel an Parallelen sind gleich (β1 = β2).
Dieses Gesetz nutzte Eratosthenes (um 273-um 194 v. Chr.) um den Erddurchmesser zu bestimmen.
Winkel, deren Schenkel aufeinander senkrecht stehen
Stehen die Schenkel zweier Winkel paarweise senkrecht aufeinander, so:
- sind die Winkel α und φ gleich, wenn die Scheitel außerhalb der Winkelräume des jeweils anderen Winkels liegen.
- ist die Summe der Winkel α und φ gleich 180°, wenn die Scheitel der Winkel innerhalb des Winkelraumes des jeweils anderen Winkels liegen.
Der Strahlensatz

Schneiden zwei Parallelen die Schenkel eines Winkels, so gilt nach Thales von Milet für die Abschnitte auf den Schenkeln und den Parallelen:
- AB = AC
- AD = AE
- AB ⁄ BC = AD ⁄ DE
Seit der Renaissance wird dieser Strahlensatz als Proportionalzirkel zum Berechnen von 3-Satz Aufgaben verwendet. Eine wichtige Anwendung ist der Sector von Edmund Gunter, auf dem logarithmische Skalen eingezeichnet waren.
Dreiecke
Unter den Formen von geometrischen Figuren nimmt das Dreieck eine herausragende Stellung ein. Die Beschäftigung mit dem Dreieck ist sehr alt — in der Mathematik und in der Mystik. Fast alle Probleme der Berechnung in der Ebene lassen sich durch geschickte Wahl von Dreiecken lösen, weil man jedes n-Eck (n > 3) in mehrere Dreiecke zerlegen kann. Der Satz des Pythagoras:
- a2 + b2 = c2
scheint wesentlich älter als sein Namensgeber zu sein. Pythagoras hat diese Beziehung vermutlich bereits in Ägypten kennen gelernt. Nach einem in Kahun in Ägypten gefundenen Papyrus war die Beziehung 32 + 42 = 52 bereits 4.000 v. Chr. bekannt.
Die Ägypter haben mit solchen Zahlentripeln rechte Winkel, z. B. an der Pyramidenbasis, konstruiert. Sie brauchten nur ein Seil mit Knoten im Abstand der "magischen" Zahlen, das sie zwischen den Knoten staff spannten. Die Pyramidenseiten konnten sie mit dem "Indischen Kreis" nach einer Himmelsrichtung ausrichten.
Auch dem Navigator ist das Dreieck vertraut: bei der Abstandsmessung durch Versegelung, das Stromdreieck zur Bestimmung der Kursversetzung, bei der Peilung zur Bestimmung des Schiffsortes.
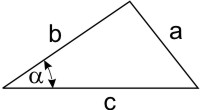
Die mathematische Definition des Dreiecks lautet:
- Schneiden sich drei Geraden in drei Punkten, so entsteht ein Dreieck.
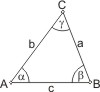
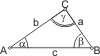
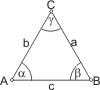
Ein Dreieck hat drei Ecken A, B, und C, drei Seiten a, b und c und drei Winkel α, β und γ. Dabei hat die einer Ecke gegenüberliegende Seite den gleichen Kleinbuchstaben, der Winkel an der Ecke den entsprechenden kleinen griechischen Buchstaben. Die Summe der Innenwinkel beträgt 180°. Die drei Eckpunkte eines Dreiecks definieren eine Ebene (deshalb wackelt ein dreibeiniger Tisch nicht).
Dreiecksarten
 |
 |
 |
|
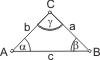
spitzwinkliges Dreieck alle Seiten sind ungleich lang (a ≠ b ≠ c), alle Winkel sind ungleich und α, β, γ sind < 90° |
stumpfwinkliges Dreieck alle Seiten sind ungleich lang (a ≠ b ≠ c), ein Winkel α ist > 90° |
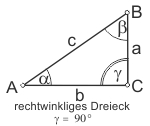
rechtwinkliges Dreieck alle Seiten sind ungleich lang (a ≠ b ≠ c), ein Winkel γ = 90° |
 |
 |
 |
|
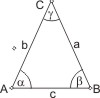
gleichschenkliges Dreieck zwei Seiten sind gleich lang (a = b), zwei Winkel α = β sind gleich |
gleichschenklig-rechtwinkliges Dreieck zwei Seiten sind gleich lang (a = b), ein Winkel γ = 90°, die beiden anderen α = β = 45° |
gleichseitiges Dreieck alle Seiten sind gleich lang (a = b = c), alle Winkel α = β = γ = 60° |
Ähnlichkeitssätze im Dreieck
Das Ähnlichkeitskriterium von Dreiecken ist von herausragender Bedeutung für die Berechnung unübersichtlicher Zusammenhänge, die sich auf Dreiecke zurückführen lassen. In ähnlichen Dreiecken sind nämlich die Verhältnisse von Seitenlängen gleich. Archimedes verwendet diese Argumentation in seiner Bestimmung der Zahl π.
Zwei Dreiecke sind ähnlich, wenn sie
- in zwei Winkeln (trivial: die Winkelsumme der drei Winkel ist 180°),
- in allen Verhältnissen entsprechender Seiten,
- in einem Winkel und im Verhältnis einer anliegenden Seite,
- im Verhältnis zweier Seiten und dem der größeren Seite gegenüberliegenden Winkel
übereinstimmen.
(siehe auch: Grundprobleme im schiefwinkligen Dreieck).)
Der Umkreis des Dreiecks

Jedes Dreieck hat einen Umkreis (blau), auf dem die Ecken liegen. (Auch der Kreis definiert eine Ebene.) Die Seiten des Dreiecks sind Sehnen des Umkreises (Sehnendreieck).
Den Mittelpunkt M des Umkreises findet man als Schnittpunkt der Mittelsenkrechten (rot) der Dreiecksseiten. Im spitzwinkligen Dreieck liegt der Mittelpunkt des Umkreises innerhalb des Dreiecks, bei stumpfwinkligen liegt er außerhalb, und bei rechtwinkligen Dreiecken liegt er auf der Hypothenuse (Kreis des Thales). Die Hypothenuse des rechtwinkligen Dreiecks ist ein Durchmesser des Umkreises.
Beispiele für die Anwendung der Sätze des Euklid über Kreis und Gerade in den Navigationsaufgaben sind die Ortsbestimmungen durch Kreuzpeilung und durch zwei Horizontalwinkel.
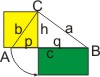
Der Inkreis des Dreiecks
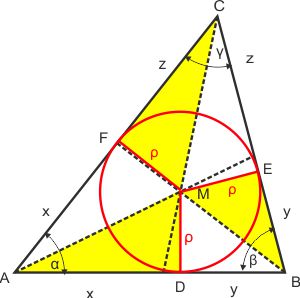
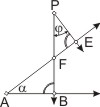
Der Mittelpunkt M des dem Dreieck einbeschriebenen Kreises ist der Schnittpunlt der Winkelhalbierenden AE, BF und CD. Man fällt die Lote vom Mittelpunkt M auf die Seiten des Dreiecks, deren Fußpunkte die Berührungspunkte D, E, F des Inkreises sind. Die entshenden Seitenabschnitte sind paarweise gleich:
- AD = AF = x
- BD = BE = y
- CE = CF = z
- und
- y + z = a
- x + z = b
- x + y = c
Gleichzeitig enstehen paarweise ähnliche Dreiecke (gelb) mit dem Inkreisradius ρ als Gegenkathete, so dass
- tan (½ · α) = ρ ⁄ x
- tan (½ · β) = ρ ⁄ y
- tan (½ · γ) = ρ ⁄ z
Damit hat man genügend viele Gleichungen und es ist eine reine Fleißaufgabe, die Formel für den Inkreisradius ρ zu finden. Um die Umformungen übersichtlicher zu gestalten, setzt man (x +y +z) = s = ½(a +b +c). Man erhält:
Euklids Sätze über Kreis und Gerade
In seinem dritten Buch der Elementa gibt Euklid eine Übersicht der Verhältnisse von Kreis und Gerade in der Ebene. Es gliedert sich in drei Abschnitte:
- Von geraden Linien, welche in Bezug auf den Kreis teils schneidende, teils berührende sind. (Lehrsätze 1 - 19)
- Von Winkeln, deren Scheitel teils im Mittelpunkt, teils in der Peripherie des Kreises liegen. (Lehrsätze 24 - 34)
- Von Rechtecken und Quadraten solcher Linien, welche zum Teil in dem Kreis, zum Teil an und ausser demselben sich befinden. (Lehrsätze 35 - 37)
Ein Kreis kann von einer Geraden berührt (Tangente), oder geschnitten (Sehne, Sekante) werden. Ein paar dieser Lehrsätze waren zu meiner Zeit Schulstoff, zur Navigation braucht man nur die Sätze über Kreissehnen für die Ortsbestimmung aus zwei Horizontalwinkeln und die Bestimmung eines Gefahrwinkels bei der Annäherung an ein Hinderniss.
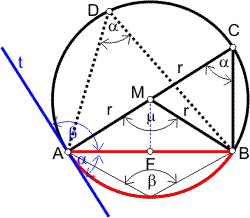
Der Kreis hat den Mittelpunkt M. Es ist eine Sehne AB (rot) eingezeichnet, und eine Tangente in A (blau), die auf dem Durchmesser AC senkrecht steht. Die rote AB Sehne ist ein Mass für den roten Kreisbogen AB (Kepler verwendet "Sehne" und "Kreisbogen" synonym bei der Ableitung der nach ihm benannten Gleichung.) Es sind zwei beliebige Punkte C und D auf dem Kreis gegeben. Die Winkel ∠ACB und ∠ADB sind gleich α. Im Falle dass die Sehne ein Kreisdurchmesser ist (also durch den Mittelpunkt M geht), ist α = 90° (Satz des Thales). Der Winkel ∠AMB = μ ist doppelt so groß wie α: μ = 2 · α, das Lot MF auf die Sehne AB halbiert den Winkel μ.
Im rechtwinkligen Dreieck ABC erkennt man den Zusammenhang zwischen Kreisdurchmesser AC und der Sehne AB direkt: AB = 2 · r · sin α. Da alle Peripheriewinkel über der Sehne gleich sind, gilt dieser Zusammenhang allgemein (Sehnensatz). Aus dieser Formel kann man leicht den Sinussatz im ebenen schiefwinkligen Dreieck ableiten.
Die blaue Tangente in A schließt mit der roten Sehne auf der einen Seite den Peripheriewinkel α ein, auf der anderen den Winkel β, der μ gegenüber liegt. (Sehne-Tangente-Satz)
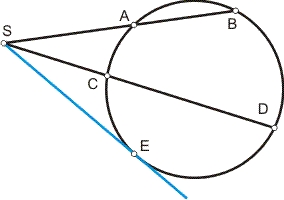
Schneiden sich zwei Sekanten AS und DS in einem Punkt S außerhalb des Kreisen, so gilt:
- SA · SB = SC · SD (Sekantensatz)
Schneiden sich in einem Punkt S außerhalb des Kreises eine Sekante DS und eine Tangente ES (blau), so gilt:
- ES2 = SC · SD (Sekanten-Tangenten-Satz)
Wenn sich zwei Sehnen AB und CD im Punkt S schneiden, sind die Verhältnisse der Sehnenabschnitte gleich:
- AS : BS = CS : DS.
- (Sehnensatz)
Verbindet man die Schnittpunkte der Sehnen mit dem Kreis, so entsteht ein Sehnenviereck ADBC mit den Sehnen als Diagonalen. Wählt man die beiden Sehnen so, dass die eine durch den Mittelpunkt des Kreises geht (ein Durchmesser ist) und die andere auf ihr senkrecht steht, erhält man den Höhensatz.
- Im Sehnenviereck ergänzen sich die gegenüberliegenden Innenwinkel zu 180°:
- α + β = γ + δ = 180°.
Und die Summe der Produkte gegenüberliegender Seiten ist gleich dem Produkt der Diagonalen:
- AD · BC + AC ·BD = AB · CD (Satz des Ptolemäus).
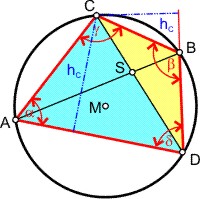
Die Fläche des Sehnenvierecks
Damit wird es relativ einfach, die Fläche des Sehnenvierecks FADBC zu berechnen. (Dies stammt allerdings nicht von Eukild!) Man zerlegt es in die beiden Dreiecke ADC (blau) und CDB (gelb). Deren Flächen FADC und FCDB berechnet, man nach der Formel:
- FADC = ½ · AD · hc (hc ist die Höhe, d. i. das Lot von C auf AD).
- Da
- hc = AC · sin α,
- ergibt sich
- FADC = ½ · AD · AC · sin α.
Mit den gleichen Überlegungen erhält man für sie Fläche des gelben Dreiecks:
- FCDB = ½ · BD · CB · sin (180° - β).
Nun haben wir eine Formel zur Berechnung der Fläche des Sehnenvierecks:
- FADBC = FADC + FCDB = ½ · (AD · AC · sin α + BD · CB · sin β)
(Denn nach den Phasenbeziehungen der Winkelfunkionen ist sin (180° ± β) = sin β, weil die Sinusfunktion periodisch ist! Die Cosinusfunktion ist es auch, aber da wechselt das Vorzeichen, wenn man 180° addiert oder subtrahiert.)
Da sich die Gegenwinkel im Sehnenviereck zu 180° ergänzen, und wegen der Phasenbeziehung der Sinusfunktion, gilt damit im Sehnenviereck nach Ausklammern der Winkelfunktion:
- FADBC = ½ · (AD · AC + BD · CB) · sin α.
Diese Gleichung für die Fläche des Sehnenvierecks kann man nun noch vereinfachen, und die Winkelfunktion eines der Innenwinkel eliminieren. Dazu wendet man den Cosinussatz im schiefwinkligen Dreieck an um die Länge der Diagonalen CD zu berechnen. Für das blaue Dreieck ist die:
- AC2 + AD2 - CB2 - BD2 = 2 · (AD · AC + BD · CB) · cos α
Jetzt haben wir zwei Formeln, die im Klammerausdruck Ćbereinstimmen, aber leider als Faktor andere Winkelfunktionen haben. Die kann man aber — wie bei der Definition der Winkelfunktionen erwähnt — in einander überführen: sin2 α + cos2 α = 1. Man muss nur die beiden Gleichungen quadrieren:
- 4 · FADBC2 = (AD · AC + BD · CB)2 · sin2 α
- (AC2 + AD2 - CB2 - BD2)2 = 4 · (AD · AC + BD · CB)2 ·(1 - sin2 α)
Die zweite dieser Gleichungen löst man nach sin2 α auf:

und setz den Ausdruck für sin2 α in die erste Gleichung ein:

Man multipliziert mit 4 und kürzt den Nenner des Bruchs:
- 16 · F2 = 4 · (AD ·AC + BD · CB)2 - (AC2 + AD2 - CB2 - BD2)2
Die rechte Seite der Gleichung hat dir Form (x2 - y2) = (x + y) · (x - y), wir erhalten den Ausdruck:
- [2 · (AD ·AC + BD · CB) + AC2 + AD2 - CB2 - BD2] · [2 · (AD ·AC + BD · CB) - AC2 - AD2 + CB2 + BD2]
In jeder der beiden eckigen Klammern erkennt man die Glieder zweier binominalen Gleichungen (x2 ± 2 · x · y + y2). Die runden Klammerausdrücke werden ausmultipliziert, die Glieder umgruppiert, und neu zusammengefasst:
- [(AC + AD)2 - (BD - CB)2] · [(AC - AD)2 - (BD + CB)2]
Wieder haben wir die Summe zweier Quadrate, dir wir in ein Produkt zweier Summen zerlegen können:
- (AC + AD + BD - CB) · (AC + AD - BD + CB) · (AC - AD + BD + CB) · (-AC + AD + BD + CB)
Das Ergebnis sind 4 Produkte aus Summen, die alle die Rechteckseiten enhalten, allerdings jeweils ein Summand mit negativem Vorzeichen. Zur Vereinfachung (& damit man es sich besser merken kann) führt man daher den halben Rechtecksumfang s = ½ · (AC + AD + BC + BD) ein.
Zu der Summe (AC + AD + BD - CB) addieren wir 0 = + CB - CB:
- AC + AD + BD - CB + CB - CB = (AC + AD + BD + CB) - 2 CB.
Die hier in der Klammer stehende Summe ist 2 · s, also:
- (AC + AD + BD - CB) = 2 · (s - CB)
Ebenso wird mit den anderen Klammerausdrücken verfahren. Wir erhalten aus dem Produkt von vier Summen:
- 2 · (s - CB) · 2 · (s - BD) · 2 · (s - AD) · 2 · (s - AC) = 16 · (s - CB) · (s - BD) · (s - AD) · (s - AC)
Diesen Ausdruck setzten wir in die Formel für die Fläche des Sehnenvierecks ein, kürzen den Faktor 16 auf beiden Seiten und ziehen die Wurzel:
- FADBC = √(s - CB) · (s - BD) · (s - AD) · (s - AC)
Diese Formel wurde von Brahmagupta angegeben, einem indischen Mathematiker und Astronomen, der von 597 bis 668 lebte und wesentliche Beiträge zur Arithmetik entwickelte. Die Herleitung der Formel stammt von dem ebenfalls indischen Mathematiker Jyeshtadeva (≈1500 - ≈1610).
In der Ableitung der Flächenformel für das allgemeine Viereck kann man die Winkelfunktion nicht eliminieren (s. o.), denn es gibt keine Beziehung für Winkelpaare. Die Ableitung wurde von C. A. Bretschneider 1842 im "Archiv der Mathematik und Physik" veröffentlicht.
Das rechtwinklige Dreieck
Lehrsätze im rechtwinkligen Dreieck
Im rechtwinkligen Dreieck gibt es drei für die Navigation wichtige Sätze über die Verhältnisse der Seiten. Sie sind deshalb wichtig. Weil man durch das Fällen einer Höhe jedes beliebige Dreieck in zwei rechtwinklige teilen kann. Die Höhe ist eine Strecke, die auf einer Seite senkrecht steht und durch die gegenüberliegende Ecke geht.
Der Satz des Pythagoras
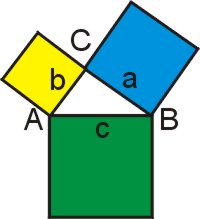
Der Satz des Pythagoras besagt, dass in einem rechtwinkligen Dreick die Summe der Quadrate der Kathetenlängen gleich der Summe des Quadrats der Hypotenusenlänge ist.
- a2 + b2 = c2
Dieser Satz gibt den Einstieg in die Berechnung von beliebigen Dreiecken, wenn man die Länge zweier Seiten kennt. Mit dem Rechenschieber lassen sich diese Art Aufgaben schnell lösen.
Der Satz des Thales
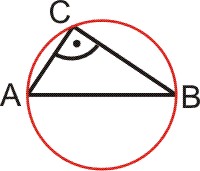
Ist AB der Durchmesser eines Kreises, so ist jedes Dreieck, dessen dritte Ecke auf dem Kreis liegt rechtwinklig.
Der Satz des Euklid
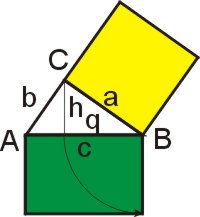
Euklid setzte die Hypotenuse des rechtwinkligen Dreiecks ins Verhältnis zur Kathete und dem Hypotenusenabschnitt, den die Höhe auf die Hypotenuse erzeugt. Das Quadrat der Kathete ist gleich dem Produkt aus Hypotenusenlänge und Länge des Hypotenusenabschnitts unter der Kathete.
- a2 = c · q
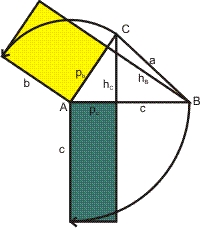
Der Höhensatz im rechtwinkligen Dreieck
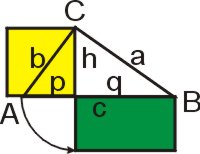
Dieser Satz im Zusammenhang mit dem Satz von Euklid ist wichtig, denn er gibt den Einstieg in die Sätze über Winkel im schiefwinkligen Dreieck.
Das Quadrat der Länge der Höhe h auf die Hypotenuse ist gleich dem Prokukt der beiden durch die Höhe erzeugten Hypotenusenabschnitten p und q.
- h2 = p · q
Der Höhensatz ist eine Sonderform des Sehnensatzes. Der Kreis über AB als Durchmesser ist ein Thales-Kreis!
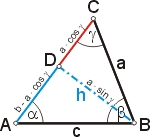
Der Höhensatz im allgemeinen Dreieck (Projektionssatz)
In einem beliebigen Dreieck sind die Rechtecke, die aus einer Seite und der orthogonalen Projektion der anderen gebildet werden, flächengleich.
- c · pc = b · pb
Diesen Höhensatz kann man im allgemeinen, schiefwinkligen Dreieck formulieren. Er ist die Verallgemeinerung des Satzes des Euklids für das rechtwinklige Dreieck. (Systematisch passt er daher zu den hier aufgeführten Sätzen.)
Eine andere Formulierung:
- c = pc + qc = a · cos β + b · cos α
Hieraus ergibt sich der Cosinussatz im schiefwinkligen Dreieck.
Berechnung der vier Grundprobleme im rechtwinkligen Dreieck
Das rechtwinklige Dreieck ist die Grundlage der ebenen und der sphärischen Trigonometrie. Da die Größe eines Winkels bekannt ist (der rechte hat 90°) und es den Satz des Pythagoras gibt, wird die Berechnung der anderen Größe leichter. Im Grunde löst man alle trigonometrischen Probleme, in dem man rechtwinklige Dreiecke sucht. Seine Seiten haben besondere Bezeichnungen: die dem rechten Winkel gegenüberliegende Seite heißt Hypotenuse, die beiden anderen Seiten, die den rechten Winkel einschließen, sind die Katheten. Am rechtwinkligen Dreieck werden auch die Winkelfunktionen definiert.
Die Definitionen der Winkelfunktionen erfolgt durch Seitenverhältnisse im rechtwinkligen Dreieck:
- die Funktion des Sinus des Winkels α als Verhältnis des Gegenkathete zur Hypotenuse definiert: sin α = a ⁄ c
- die Funktion des Cosinus des Winkels α als Verhältnis des Ankathete zur Hypotenuse: cos α = b ⁄ c.
Damit kann man die vier Grundaufgaben der Berechnung aller Größen im Dreieck (3 Seiten und 3 Winkel) lösen, wenn man nur zwei zusätzlich kennt (das dritte, der rechte Winkel, hat definitionsgemäß 90°).
| gegeben ist die Hypotenuse c und ein anliegender Winkel α; |
|
| gegeben ist die Hypotenuse c und eine Kathete, z. B. a; |
|
|
|
|
| gegeben ist eine Kathete a und ein Winkel α; |
|
| gegeben sind die beiden Katheten a, b. |
|
Beispiel für die Anwendung:
Es sind z. B. gegeben α und b. Aus den Definitionen der Winkelfunktionen:
- sin α = a ⁄ c und
- cos α = b ⁄ c.
Beide Gleichungen löst man nach c auf und erhält: a ⁄ sin α = b ⁄ cos α ⇒ a = b·(sin α ⁄ cos α) = b·tan α.
Damit kann man die Seite a berechnen. Die Seite c erhält man aus der Gleichung 2. Und der Winkel β ist β = 90° - α.
Analog kann man die anderen Grundprobleme nachvollziehen.
Alternative zur Berechnung des zweiten Grundproblems mit dem Rechenschieber
Gegeben sind die Kathete a und die Hypotenuse c.
Da Ingenieure häufig die Längen der Hypotenuse und einer Kathete kennen und die Länge der zweiten Kathete und die Winkel des Dreiecks wissen wollen, hat Alwin Oswald Walther an der TH Darmstadt 1934 die pythagoreische Skala mit Werten von √ 1 - x2) auf Rechenschiebern des System Darmstadt eingeführt.

Ein Rechenbeispiel ist im Abschnitt "Rechenschieber" ausgeführt.
Das schiefwinklige Dreieck
Wer mit den Sätzen im rechtwinkligen Dreieck vertraut ist, wird hier die gewisse Verständlichkeit vermissen. Die Sätze im schiefwinkligen (allgemeinen) Dreieck sind formale Ableitungen, wobei virtuos mit den Additionstheoremen der Winkelfunktionen umgegangen wird. Die meisten hier vorgestellten Ableitungen stammen aus dem 17. Jahrhundert, und die Gleichungen sind für die Berechnung mit Logarithmentafeln optimiert — das kommt dem Rechenschieberrechner sehr gelegen! Die hier angeführte Form des Tangenssatzes wird auch "Napiersche Gleichung" genannt; sie ist speziell auf die Berechnung mit Logarithmen konzipiert.

Ein spitzwinkliges Dreieck kann man durch Fällen des Lotes von einer Ecke auf die gegenüberliegende Seite c in zwei rechtwinklige teilen. Dieses Lot heißt Höhe hc des Dreiecks. Mit der Definition der Winkelfunktionen kann man die drei Höhen ha, b, c als Funktion einer Seite und eines Winkels beschreiben.
- hc = a · sin β = b · sin α,
- und analog
- ha = c · sin β = b · sin γ,
- hb = a · sin γ = c · sin α.
Der Sinussatz im schiefwinkligen Dreieck
Die Höhe hc gehört ja zu zwei Dreiecken mit den Winkeln α und β:
- hc = a · sin β
- hc = b · sin α.
Dividieren wir beide Seiten der Gleichung durch sin α · sin β, so erhalten wir nach Kürzen:
- a ⁄ sin α = b ⁄ sin β.
Die gleiche Überlegung für die anderen beiden Höhen führt zum Sinussatz:
- Die Seiten eines schiefwinkligen Dreiecks verhalten sich wie die Sinuswerte der den Seiten gegenüberliegenden Winkel.
Durch Umformen erhält man die folgenden drei Formeln:
- Das Verhältnis zweier Dreiecksseiten ist gleich dem Verhältnis der Sinusfunktionen der gegenüberliegenden Winkel.
Eine der beiden Formen des Sinussatz sollte man sich für die weiteren Seiten merken. Für den Navigator (vorallem den, mit dem Rechenschieber) ist die erste Formel wichtig. Und er erkennt sofort den Vorteil eines Rechenschiebers, der auf Körper und Zunge je eine Sinus-Skala besitzt, wie der Unique Navigator.
Eine andere Möglichkeit, den Sinussatz herzuleiten ist der Sehnensatz. Die wird verwendet bei der Schiffsortberechnung aus der Kreuzpeilung und mit der Horizontalwinkelpeilung.
Der Cosinussatz im schiefwinkligen Dreieck
Die Höhe hc teilt die Seite c des Dreiecks in eine Strecke p und eine Strecke q, wobei p die Projektion der Seite b auf die Seite c ist.
Für p gilt daher:
- p = b · cos α.
- Analog ist
- q = a · cos β.
In den beiden, durch die Höhe hc gebildeten rechtwinkligen Dreiecken gilt daher:
- hc2 = b2 - (b · cos α)2 = a2 - (a · cos β)2.
- Durch Ausmultiplizieren und auflösen nach a2 erhält man:
- a2 = b2 + c2 - 2·b · c· cos α.
Mit der gleichen Überlegung für die anderen Höhen erhält man die Gleichungen:
- b2 = c2 + a2 - 2· c · a · cos β,
- c2 = a2 + b2 - 2· a · b · cos γ.
- Das Quadrat einer Dreiecksseite ist gleich der Summe der Quadrate der beiden anderen Seiten, vermindert um das doppelte Produkt aus diesen Seiten und dem Cosinus des Zwischenwinkels.
Da die Formeln für die Berechnung mit Logarithmen unhandlich sind, kann man sie umformen:
-
a2 = b2 + 2 · b · c + c2 - 2 · b · c - 2 · b · c · cos α = (b + c)2 - 2 · b · c ·(1 + cos α) =
= (b + c)2 - 4 · b · c · cos2 ½ · α; (mit 1 + cos α = 2 · cos2 ½ · α) -
a2 = b2 - 2 · b · c + c2 + 2 · b · c - 2 · b · c · cos α = (b - c)2 + 2 · b · c ·(1 - cos α) =
= (b - c)2 + 4 · b · c · sin2 ½ · α; (mit 1 - cos α = 2 · sin2 ½ · α)
Der Tangenssatz
Der Tangenssatz leitet sich mit ein paar trickreichen arithmetischen Umformungen aus dem Sinussatz ab. Man addiert bzw. subtrahiert auf beiden Seiten der Gleichung eine 1 und formt um:
Dann dividiert man die beiden Gleichungen (die mit + und die mit -) durcheinander:
und wendet die Additionstheoreme für Winkelfunktionen an:
- Der Tangenssatz setzt die Tangensfunktionen der halben Winkelsumme bzw. -differenz ins Verhältnis zu der Summe bzw. Differenz der jeweils gegenüberliegenden Seiten.
Da der dritte Winkel, γ, die Summe α + β zu 180° ergänzt, kann man schreiben:
 .
.
Und da (tan α)-1 = cot α kann man auch schreiben:
- (a + b) ⁄ (a - b) = cot ½·γ · cot ½·(α - β).
Damit sind alle drei Winkel mit zwei Seiten in Beziehung gebracht. Die letzte Gleichung wird in der Form:
zur Berechnung des schiefwinkligen Dreiecks benutzt.
Der Cotangenssatz
Da die Formeln des Cosinussatzes nicht gut für die Rechnung geeignet sind, werden die Gleichungen — wie beim Tangenssatz — umgeformt. Die drei Gleichungen
- a2 = b2 + c2 - 2 · b · c· cos α,
- b2 = c2 + a2 - 2· c · a · cos β,
- c2 = a2 + b2 - 2· a · b · cos γ,
werden nach den Cosinussen der Winkel aufgelöst.
Zunächst ergänzt man die rechte Seite der ersten Gleichung mit 0 = 2 · b · c - 2 · b · c und stellt die Glieder um:
- a2 = b2 + c2 - 2 · b · c - (2 · b · c · cos α + 2 · b · c ).
Nun erkennt man, dass (b - c)2 = b2 + c2 - 2 · b · c und dass
2 · b · c · cos α + 2 · b · c = 2 · b · c · (1 + cos α).
Aus den Formeln der Funktionen halber Winkel weiß man, dass 1 + cos α = 2 · cos2(α ⁄ 2). Das substituiert man in der vorstehenden Formel.
Andererseits kann man die ergänzte Formel auch so zusammenfassen, dass sich ergibt:
a2 = (b - c)2 - 2 · b · c · (1 - cos α). Hier substituiert man 1 - cos α = 2 · sin2(α ⁄ 2). Die beiden Formeln werden nach cos2(α ⁄ 2) bzw. sin2(α ⁄ 2) aufgelöst und jeweils die Wurzel gezogen:
Zur Vereinfachung der Formeln setzte man willkürlich s = ½ · (a + b + c):
- und dividiert beide (cos α ⁄ sin α = cot α):

Wunderbarer Weise erkennt man in dem rechten Wurzelausdruck den Kehrwert der Formel für den Inkreisradius ρ wieder. Und nun werden die Formeln wirklich einfach und leicht zu merken.



Da auf der rechten Seite der Gleichungen nur Konstanten für ein gegebenes Dreieck stehen (und man die einzige Differenz einfach berechnen kann), sind diese Formeln vorzüglich für die Logarithmentafel und den Rechenschieber geeignet.
Der Halbwinkelsatz
Nach dem gleichen Formalismus, mit dem wir den Cotangenssatz hergeleitet haben, kann man auch auf den Tangens der halben Winkelargumente kommen. Man dividiert andersherum (sin α ⁄ cos α = tan α) und erhält:
und analog für die anderen Winkel und Seiten.
Die Winkelsummen im allgemeinen Dreieck
Diese sechs Sätze über Winkel im Dreieck werden uns auch ständig bei der Analyse der Navigationsaufgaben begleiten.
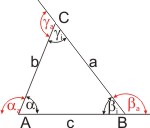
Die Summe der Innenwinkel im Dreieck beträgt 180°.
- αi + βi + γi = 180°
die Summe der Außenwinkel des Dreiecks beträgt 360°.
- αa + βa + γa = 360°
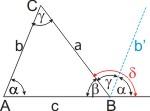
Ein Außenwinkel des Dreiecks ist gleich der Summe der nicht anliegenden Innenwinkel.
- δ = α + γ
- (siehe Winkel an Parallelen)
- Die Summe zweier Dreiecksseiten ist größer als die dritte Seite.
- Die Differenz zweier Dreiecksseiten ist kleiner als die dritte Seite.
- In jedem Dreieck liegt die größte Seite dem größten Winkel gegenüber.
Berechnung der Stücke im schiefwinkligen Dreieck
Für das schiefwinklige Dreieck gibt es leider keine so einfache Berechnungsregel wie den Satz des Pythagoras, mit dem man die Seitenlängen berechnen kann. Durch das fällen von Höhen kann man aber jedes schiefwinklige Dreieck in zwei rechtwinklige teilen und die Berechnung im Prinzip auf rechtwinklige Dreiecke zurückführen.
Da man aber bis in die 80′er Jahre des 20. Jahrhunderts Berechnungen mit der Logarithmentafel oder dem Rechenschieber ausführte, gibt es einige geschickte Formeln, um aus drei gegebenen Stücken des schiefwinkligen Dreiecks die anderen drei zu berechnen. Man kennt fünf Grundprobleme (beim rechtwinkligen nur sind es nur vier).
| Problem | gegeben | gesucht |
|---|---|---|
| 1. | die drei Seiten a, b, c | die drei Winkel α, β, γ |
| 2. | zwei Seiten und der eingeschlossene Winkel z. B. a, b, γ |
die dritte Seite und die beiden anderen Winkel z. B. c, α, β |
| 3. | zwei Seiten und der Winkel, der der größeren Seite gegenüber liegt z. B. a, b, β |
die dritte Seite und die beiden anderen Winkel z. B. c, α, γ |
| 4. | zwei Seiten und der Winkel, der der kleineren Seite gegenüber liegt z. B. a, b, α |
die dritte Seite und die beiden anderen Winkel z. B. c, β, γ |
| 5. | eine Seite und die beiden anliegenden Winkel z. B. c, α, β |
die beiden anderen Seiten und der dritte Winkel z. B. a, b, γ |
Das erste Grundproblem
Wenn nur die drei Seiten gegeben sind, kann man nur den Cosinussatz anwenden. Man löst die drei Gleichungen nach den Cosinussen der drei Winkel auf und erhält Ausdrücke, die auf der anderen Seite nur die Seiten enthalten:
Diese Gleichungen sind für Berechnungen ohne Computer umständlich: man muß Quadrate und Produkte bilden, diese addieren und die Summen dividieren. Deshalb werden die Formeln des Cosinussatzes weiter umgeformt zum Cotangenssatz oder für den Rechenschieber durch Einführen des Sinus versus optimiert.
Die Formel a2 = b2 + c2 - 2 · b · c · cos α wird um + 2 · b · c - 2 · b · c = 0 ergänzt und zusammengefasst: a2 = (b + c)2 - 2 · b · c · ( 1 + cos α). Nun substituiert man (1 + cos α) durch 2 · cos2(α ⁄ 2) (s. Formeln für doppelte und halbe Winkelargumente) und erhält a2 = (b + c)2 · cos2(α ⁄ 2).
Wenn man die ergänzte Formel anders zusammenfasst erhält man a2 = (b - c)2 - 2 · b · c ·(1 - cos α) und hier substituiert man (1 - cos α) = 2 · sin2(α ⁄ 2) (s. Formeln für doppelte und halbe Winkelargumente). Diese beiden Formeln werden nach sin2(α ⁄ 2) bzw. cos2(α ⁄ 2) aufgelöst und nach Wurzelziehen bekommt man die beiden Ausdrücke:
Diese beiden Formeln werden nach sin2 (α ⁄ 2) bzw. cos2 (α ⁄ 2) aufgelöst und nach Wurzelziehen bekommt man die beiden Ausdrücke:
Zur Vereinfachung setzt man (willkürlich) a + b + c = 2 · s und bekommt die beiden einfachen Formeln:
Diese beiden Gleichungen werden durcheinander dividiert (cos α ⁄ sin α = cot α):

Der Wurzelausdruck ist nun (zufällig) die Formel für den Kehrwert des Inkreisradius ρ des Dreiecks. Führt man diese ganze Prozedur auch für die anderen Seiten durch, erhält man schließlich den Cotangenssatz:

Nun hat man einen Formelsatz, den man sich leicht merken kann, und der auf der einen Seite eine Funktion eines Winkels mit den Dreiecksseiten auf der anderen Formelseite korreliert. Zum Berechnen eines Winkels rechnet man (im Kopf) s und das Wurzelargument von ρ aus, zieht die Wurzel, und kann dann mit einer Rechenschieberdivision den Winkel ermitteln.
Der Cotangenssatz wurde 1596 von Georg Joachim Rhaeticus (1514-1574) abgeleitet.
Das zweite Grundproblem
Wenn der von zwei Seiten eingeschlossene Winkel und die beiden Seiten gegeben sind, kann man wieder nach dem Cosinussatz rechnen, was aber mit dem gewöhnlichen Rechenschieber des System Rietz umständlich ist. Ein Rechenschieber des Systems Darmstadt hat dagegen die pythagoreische Skala mit Werten √(1 - x2).
Sonst berechnet man mit dem Tangenssatz die beiden gesuchten Winkel, und dann den Sinussatz für die dritte Seite.
Mit dieser Rechnung erhält man die Differenz der beiden gesuchten Winkel α - β. Aus der Winkelsumme im Dreieck erhält man für die Summe der beiden gesuchten Winkel α + β = 180° - γ. Durch Addition bzw. Subtraktion der beiden Werte berechnet man α und β: α + β + α - β = 2· α bzw. α + β - (α - β) = 2· β.
Nun kann man den Sinusatz anwenden um die dritte Seite zu berechnen:
(Ein Beispiel ist die Stromversetzung.)
Einen der gesuchten Winkel, z. B. α kann man auch nach einer Formel berechnen, die sich auch nicht optimal für den Rechenschieber eignet.
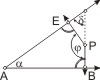
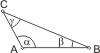
Zur Ableitung fällt man in dem zu berechnenden Dreieck eine Höhe auf eine der gegebenen Seiten (b), sodass der gegebene Winkel (γ) nicht geteilt wird. Der Tangens des gesuchten Winkels (α) im Teildreieck ABD ist dann der Quotient aus Gegenkathete BD = h und Ankathete AD. Die Gegenkathete berechnet sich aus dem Sinus des gegebenen Winkels (sin γ) und der Hypotenuse des Dreiecks BCD, a. Die Ankathete ist die Differenz der gegebenen Seite b und dem mit dem Cosinus des gegebenen Winkels (cos γ) Streckenteil CD. Man erhält:
Das dritte Grundproblem
Das dritte und das vierte Grundproblem sind ähnlich: es sind zwei Seiten und ein nicht eingeschlossener Winkel gegeben. Allerdings ist das dritte immer lösbar, das vierte liefert entweder eine triviale, zwei verschiedene, oder gar kein Ergebnis.
Beide löst man mit dem Sinussatz und berechnet zunächst den Winkel α.
Hier sieht man schon die Beschränkung: da sin α immer kleiner sein muss als 1, muss a · sin β kleiner sein als b.
Man stellt also auf dem Rechenschieber den Läufer über den gegebenen Winkel β auf S und die gegenüberliegende Seite b auf C unter den Läufer. Verschiebt man den Läufer auf die zweite gegebene Seite a auf der Skala C, dann steht unter den Läufer auf S der zweite Winkel α. Mit α und β kann man γ aus der Winkelsumme im Dreieck (= 180°) den dritten Winkel γ im Kopf berechnen. Hat man nun die Einstellung des Rechenschiebers nicht verändert, schiebt amn einfach den Läufer über γ auf S und liest auf C die dritte Seite c ab.
Das vierte Grundproblem
Die Lösung des vierten Grundproblems ist gleich der des dritten. Wegen der Beschränkung, dass der Sinus (und der Cosinus) nur definiert sind als Zahlen kleiner 1. In der Gleichung:

muss also b·sin α < a sein. Wir unterscheiden drei Fälle:
| b·sin α > a | die Aufgabe ist nicht lösbar. |
| b·sin α = a | das Dreieck ist rechtwinklig (b ist die Hypotenuse); damit ist auch β bekannt (= 90° - α), der Rest ist Sinussatz. |
| b·sin α > a | man erhält zwei Werte für: β und (180° - β). Man berechnet beide Werte und entscheidet, welcher der richtige ist. |
Mit dem Rechenschieber kann man schnell entscheiden, welcher der drei Fälle vorliegt (b·sin α ist mit einer Einstellung ermittelt). Der weitere Gang der Lösung entspricht dem dritten Grundproblem.
Das fünfte Grundproblem
Immer, wenn zwei Winkel gegeben sind, ist der dritte aus der Winkelsumme im Dreieck zu berechnen. Mit einer gegebenen Seite kann man den Sinussatz (z. B. drittes Grundproblem) anwenden und — mit dem Rechenschieber mit einer Zungeneinstellung nur durch Verschieben des Läufers — die beiden gesuchten Seiten berechnen.
- α = 180° - (β + γ)
- b = a · sin β ⁄ sin α
- c = a · sin γ ⁄ sin α
Es gibt keine weiteren Berechnungsmöglichkeiten. Sind nur die drei Winkel gegeben, gibt es eine unendlich große Zahl Dreiecke, die der Bedingung gehorchen.
Die Winkelfunktionen
Die Definition der Winkelfunktionen
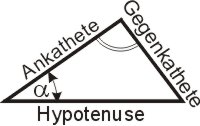
Wenn man alle möglichen Dreiecke berechnet hat, dann erkennt man einen Zusammenhang zwischen dem Winkel und seiner gegenüberliegenden Seite: je größer der Winkel, desto länger ist die gegenüberliegende Dreiecksseite. Der Zusammenhang zwischen Winkel und seiner gegenüberliegenden Seite ist eine Funktion (im hier verwendeten Sinne eine mathematische Rechenvorschrift). Aus historischen Gründen werden die Winkelfunktionen am rechtwinkligen Dreieck abgeleitet. Im rechtwinkligen Dreieck heisst die dem rechten Winkel gegenüberliegende Seite Hypotenuse, die beiden anderen Seiten sind die Katheten. Hier unterscheidet man die Ankathete (b ist Ankathete zum Winkel α) und Gegenkathete (a ist Gegenkathete zum Winkel α).
- das Verhältnis der Gegenkathete a zur Hypotenuse c heisst Sinus von α: sin α = a ⁄ c;
- das Verhältnis der Ankathete b zur Hypotenuse c heisst Cosinus von α: cos α = b ⁄ c
- das Verhältnis der Gegenkathete a zur Ankathete b heisst Tangens von α: tan α = a ⁄ b;
- das Verhältnis der Ankathete b zur Gegenkathete a heisst Cotangens von α: cot α = b ⁄ a.
Da die Hypotenuse die längste Seite im rechtwinkligen Dreieck ist, sind die Funktionen eines spitzen Winkels positive Zahlen, und der Sinus und der Cosinus sind immer kleiner als eins.
Historische Winkelfunktionen
In alten Büchern findet man noch zwei weitere Winkelfunktionen: Secans (sec) und Cosecans (cosec). Es sind das die Kehrwerte von Sinus bzw. Cosinus.
Und zur Vereinfachung der Berechnungen im schiefwinkligen Dreieck gab es Tabellen des sinus versus (versin) seiner halben Werte (Haversine). Die geometrische Erklärung wird im Zusammenhang mit den Sinustabellen gegeben.
- versine α = 1 - cos α,
- haversine α = ½ · (1 - cos α).
Beziehungen der Winkelfunktionen
Die Winkelfunktionen des gleichen Winkels stehen zu einander in Beziehungen. Man kann die leicht ableiten, wenn man den Satz des Pythagoras anwendet: a2 + b2 = c2. Setzt man für
- a2 = (c · sin α)2
- b2 = (c · cos α)2
- c2 = 12 = 1,
- erhält man
- sin2 α + cos2 α = 1
Da im rechtwinkligen Dreieck außerdem α + β = 90° gilt und die Phasenbeziehung der Winkelfunktionen sagt sin α = cos (90° - α), ist die Beziehung der Winkelfunktionen auch sin2 α + sin2 β = 1. Nach dem gleichen Formalismus erhält man:
- a2 =(c · sin α)2
- b2 = (c · sin β)2
- sin2 α = 1 - sin2 β.
Radiziert man diese letzte Formel erhält man:
Damit hat man eine einfache Beziehung für die Berechnung der Stücke des rechtwinkligen Dreiecks mit einem Rechenschieber, der eine "pythagoreische" Skala mit Werten von √(1 - sin2 β) trägt. Solche Rechenschieber sind vom System Darmstadt.
Tangens und Cotangens
Durch Division der Winkelfunktionen erhält man:

Mit diesen beiden Gleichungen kann man nun jede Funktion des Winkels α durch die anderen Funktionen ausdrücken:
| sin α |  |
 |
 |
| cos α |  |
 |
 |
| tan α |  |
 |
 |
| cot α |  |
 |
 |
Die Kofunktion
Zwischen den Funktionen der Nebenwinkel (deren Summe ja 180° beträgt) gelten im rechtwinkligen Dreieck wegen β = 90° - α die Beziehungen:
- sin α = cos(90° - α)
- cos α = sin(90° - α)
- tan α = cot(90° - α)
- cot α = tan(90° - α)
- Jede Funktion eines spitzen Winkels ist gleich der Kofunktion seines Nebenwinkels.
Für die Benennung des Sinus gibt es zwei Erklärungen.
- Sinus ist die Abkürzung des lateinischen Ausdrucks semis inscriptae = halbe Kreissehne;
- Das arabische Wort für Sehne (dschiba) wurde verwechselt mit dem arabischen Wort dschaib (Bucht) und ins lateinischen mit sinus (Bucht) übersetzt.
Die Umkehrfunktionen
Die Winkelfunktionen geben die Länge einer Dreiecksseite in Abhängigkeit von Dreieckswinkeln an. Nun kann man am Rechenschieber leicht ablesen, welcher Winkel zu einer Seitenlänge gehört. Um aber mit Gleichungen rechnen zu können (z. B. auf dem Computer), benötigt man eine Funktion, die den Winkel aus einer Seitenlänge berechnet. Diese Funktionen nennt man Umkehrfunktionen der Winkelfunktionen. Sie heissen Arcussinus (arcsin), Arcuscosinus (arccos), Arcustangens (arctan) ( der Arcuscotangens (arccot; wird häufig nicht von Softwareprogrammen angeboten, da cot α = 1 ⁄ tan α). Softwareprogramme rechnen intern im Bogenmaß, sodass das Ergebnis der Umkehrfunktionen in Bruchteilen des Umkreisumfangs angegeben wird. Zur Umrechnung in das Winkelmaß wird diese Zahl mit 360° ⁄ 2 · π multipliziert.
Die Werte der Winkelfunktionen
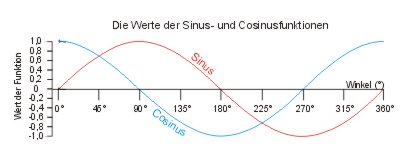
Die Sinus- und die Cosinusfunktion
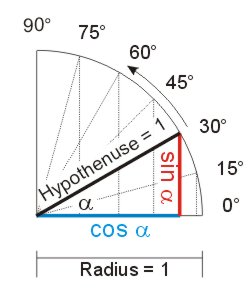
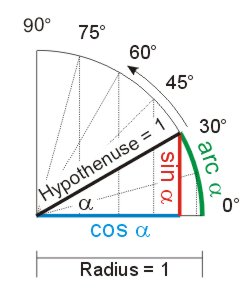
Zur Ableitung der Winkelfunktionen verwendet man einen Kreis mit Einheitsradius r = 1, in dem ein Strahl vom Mittelpunkt (im Gegenuhrzeigersinn) umläuft. Der Einfachheit halber wird nur ein Viertel des Kreises (Quadrant) abgebildet.
In einem Kreis mit dem Radius 1 (der Radius ist die Hypotenuse eines Dreicks) entspricht die Länge des Lotes (= Gegenkathete) dem Wert des Sinus, die Ankathete dem Wert des Cosinus.
Der Wert des Sinus beträgt 0 bei α = 0° und er beträgt 1 bei α = 90°; Der Cosinus ist 1 bei α = 0 und er ist 0 bei α = 90°. Wie man diese Zahlen berechnet, steht hier.
Eine Animation des Zusammenhangs gibt es hier.
Läßt man den Hypotenusenstrahl über den ganzen Kreisbogen streichen und trägt die Längen sin α und cos α gegen den Winkel α, dann erhält man zwei Kurven, die zwischen 0 und 1 oszillieren. Man sagt, die Funktionen sind zyklisch.
Die Tangens- und die Cotangensfunktion
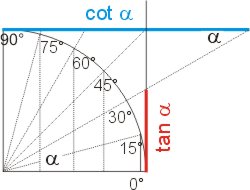
Um die Abhängigkeit des Tangens (und Cotangens) grafisch darzustellen, müssen der Hypotenusenstrahl über den Kreisbogen hinaus verlängert werden und zwei Tangenten des Umkreises eingezeichnet werden. Die Haupttangente steht senkrecht auf der Ankathete, die Nebentangente ist parallel zu ihr. Der Wert des Tangens entspricht dann der Strecke auf der Hauptkathete von der verlängerten Ankathete bis zum Schnittpunkt mit der verlängerten Hypotenuse. Man sieht, dass der Tangens für α = 0° Null ist und für α = 90° unendlich groß.
Der Cotangens entspricht in diesem Bild der Strecke auf der Nebenkathete vom Berührungspunkt mit dem Kreis bis zum Schnittpunkt der verlängerten Hypotenuse. Der Cotangens nimmt Werte zwischen 0 (bei α = 90°) bis unendlich (bei α = 0°) an. Diese beiden Funktionen sind nichtzyklisch.
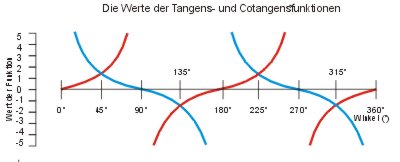
Für Winkel 0 < α < 360° sieht das Diagramm wie folgt aus. Ab bestimmten Werten für α werden die Werte für Tangens und Cotangens zu groß, um sie darzustellen. Die Tangensfunktion nimmt vor α < 90° und α < 270° unendlich große Werte an, und danach unendlich kleine; bei α = 90° und α = 270° ist sie unbestimmt. Deshalb sind die Tangensskalen auf dem Rechenschieber begrenzt auf Winkel 5,5° > α < 85,5°.
Die Arcusfunktion
Für das Rechnen mit dem Rechenschieber muss noch eine weitere Winkelfunktion erklärt werden. Die Skalen des Rechenschiebers beginnen für den Sinus und Tangens mit 5,5°, nicht mit 0°. Für Winkel unter 5,5° benutzt man statt der Länge der Sehne die Länge des Kreisbogens (Arcus). Der Fehler ist wegen der eingeschränkten Genauigkeit des Rechenschiebers vernachlässigbar.
Die Tabellen der Funktionswerte des Sinus waren von höchster Bedeutung für die Astronomie und die Entwicklung der Weltbilder. Es wurde viel Aufwand in ihre Verbesserung und Genauigkeit gesteckt. Mit den Tabellen des Regiomontanus erreichte die Genauigkeit um 1475 ihren Höhepunkt bei ½°.
Das Bogenmaß
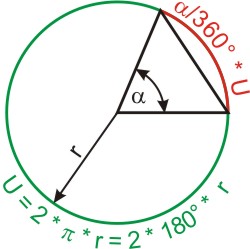
Zu erwähnen ist noch, dass man Winkel statt in Grad auch in Bruchteilen des Vollkreises angeben kann. Dabei wird der Vollkreis mit 360° gleich 2π gesetzt (π ist ja mit dem Umfang durch die Umfangformel definiert: U = 2 · π · r, wobei r der Radius (halber Durchmesser) des Kreises ist. Dieses Winkelmaß nennt man Bogenmaß.
Eine Anwendung sind Entfernungsangaben in Seemeilen. Der Erdumfang ist 360° · 60′ = 21.600 Bogenminuten oder Seemeilen. Wenn man am Äquator — oder auf einem anderen Großkreis — eine Strecke von 15° fährt, so sind das 15°/360° · 21.600 sm = 900 sm.
Die Quadrantenregel und die Phasenbeziehungen
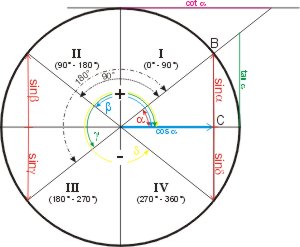
Die Größen der Winkelfunktionen wurden im Bereich α = 0° - 90° (1. Quadrant des Vollkreises) diskutiert. Betrachte wir die Größe der Winkelfunktionen im Bereich 0° bis 360° (Vollkreis). Wir erkennen:
- sin α = sin β = - sin γ = - sin δ.
- Und da
- β = α + 90°,
γ = α + 180°, - δ = α + 270°
erhalten wir die Beziehungen:
- sin α = sin (α + 90°) =
= -sin (α + 180°) = -sin (α + 270°).
Für die anderen Winkelfunktionen kann man analoge Beziehungen ablesen. Es ergibt sich die Phasenbeziehungen der Winkelfunktionen.
| sin α | cos α | tan α | cot α | ||
| -α | -sin α | cos α | -tan α | -cot α | Umklappungssatz |
| 90° ± α | cos α | +sin α | +cot α | +tan α | Drehungssätze |
| 180° ± α | +sin α | -cos α | ±tan α | ±cot α | |
| 270° ±α | -cos α | ±sin α | +cot α | +tan α | |
| 360° ± α | ±sin α | cos α | ±tan α | ±cot α | |
Die Additionstheoreme und die Summe der Funktionen
Schließlich benötigt man zum Rechnen mit Winkelfunktionen noch die Ausdrücke für zusammengesetzte Winkel und für Summe und Differenz von Winkelfunktionen.
| Additionstheoreme | Summen der Winkelfunktionen |
|
|
 |
|
Formeln für doppelte und halbe Winkelargumente
Zum eleganten Umformen von Gleichungen gibt es noch die Formeln für die trigonometrischen Funktionen der doppelten und der halben Winkel.
| doppelte Argumente | halbe Argumente |
 |
|
Die Prosthaphairese
Aus den Additionstheoremen läßt sich noch ein interessantes Konzept zur Multiplikation von Winkelfunktionen durch Addition (gr. prosthesis) und Subtraktion (gr. apharesis) von Winkeln ableiten. Es soll von Johannes Werner aus Nürnberg im Jahre 1510 (nach anderen Quellen von Ibn Junis im 11. Jahrhundert) entdeckt worden sein. Damit wurden die Multiplikationen von Winkelfunktionen in den Formeln der sphärischen Trigonometrie etwas einfacher. Tycho Brahe jedenfalls propagierte diese Methode.
Die Sinustabellen machten die Prosthapharese möglich, die auf den Formeln beruhht:
- cos α · cos β = ½ · [cos(α + β) + cos(α - β)]
- sin α · sin β = ½ · [cos(α - β) - cos(α + β)]
Beispiel

In einem rechtwinkligen sphärischen Dreieck ABC mit c = 66° 29′ und α = 23° 31′ ist die Seite b gesucht.
| größter Winkel c | 66° 29′ | Komplement | 23° 31′ | ||
| kleinerer Winkel α | 23° 31′ | 23° 31′ | |||
| Summe | 47° 2′ | Sinus (aus Tabelle) | 7.317.503 | ||
| die Hälfte | 3.658.751 | ||||
Aus der Sinustabelle findet man den zu 3.658.751 gehörigen Winkel durch Interpolation: b = 21° 27′ 41″.
Wie funktioniert das? Nach der Neperschen Regel gilt: der Cosinus eines Stücks ist gleich dem Produkt der Cotangenten. Die beiden gegebenen (c, α) und das gesuchte Stück b sind "anliegend" in der Reihenfolge a* β c α b*. Also ist cos α = cot c · cot b* = cot c · tan b. Aus den Beziehungen der Winkelfunktionen wissen wir: tan χ = sin χ ⁄ cos χ und cot χ = cos χ ⁄ sin χ.
Aber gerechnet wird offensichtlich die Formel:
- sin b = ½ · sin (90° - c + α).
Diese Formel geht auf Johannes Werner, genannt der Nürnberger, zurück. Sie wird als erste der Formeln der Prosthaphaerese bezeichnet. Er beschreibt die Ableitung im vierten Buch seiner Abhandlung De Triangulis Sphæricis, Propositiones Prima – Quinta.
Die Methode wird von Georg Ludwig Frobenius in Isagoge Prosthaphaeretiva (1634) ausführlich erläutert.
© Rainer Stumpe, URL: www.rainerstumpe.de/
Datenschutzerklärung